 2015-06-28
2015-06-28 27793
277932.1. Транспортный процесс и его элементы
Процесс перемещения груза – это совокупность действий, связанных с его перемещением в пространстве без изменения геометрических форм, размеров и физико-химических свойств (ГОСТ 14.308-74). Процесс перемещения включает транспортирование груза и начально-конечные операции (подготовка, погрузка, разгрузка, перегрузка, складирование, подача транспортных средств и т.д.).
Транспортирование – перемещение груза по определенному маршруту от места погрузки до места разгрузки или перегрузки.
Погрузка – операция перемещения груза с места постоянного хранения или временного накопления на транспортное средство; разгрузка – перемещение груза с транспортного средства на место постоянного хранения или временного накопления; перегрузка – перемещение груза с одного транспортного средства на другое или с одного места хранения на другое; складирование – операция размещения грузов в определенном порядке для хранения или временного накопления.
Совокупность элементов, образующих законченную операцию доставки грузов, называется циклом перевозки, или ездкой. Время выполнения ездки:
 , где t дв – время движения; t п – время погрузки; t p – время разгрузки;
, где t дв – время движения; t п – время погрузки; t p – время разгрузки;
t пp – время простоя по организационным причинам (оформление документов и т.п.); l е – длина ездки; v т – техническая скорость; t п–р – время погрузки и разгрузки.
Пробегом называется расстояние, проходимое ПС за определенный период времени. Классификация различных видов пробега грузового ПС представлена на рис. 2.1. Нулевой пробег – это пробег, который необходимо совершить ПС для прибытия из АТО на первый пункт погрузки и возвращения после последней разгрузки в АТО.
Рис. 2.1. Виды пробега грузового подвижного состава
Для повышения эффективности эксплуатации ПС необходимо стремиться к снижению непроизводительного пробега. Доля пробега с грузом в общем пробеге ПС оценивается коэффициентом использования пробега  .
.
При расчетах применяют коэффициент использования пробега за ездку
 ,
,
где l ег – пробег с грузом за ездку; l х – пробег без груза за ездку.
Время пребывания АТС в наряде
 ,
,
где Т м – время работы на маршруте; t н – время на выполнение нулевого пробега.
Средняя продолжительность пребывания АТС в наряде за сутки характеризует эффективность использования парка по времени и считается как отношение общего количества автомобиле-часов пребывания в наряде за отчетный период к общему количеству автомобиле-дней эксплуатации.
Время работы на маршруте определяется соотношением:

 ,
,
где v т – техническая скорость; v э – эксплуатационная скорость; n е – количество ездок, выполняемых ПС за смену. Здесь техническая скорость учитывает только время движения ПС, а эксплуатационная дополнительно учитывает время простоя ПС при выполнении погрузочно-разгрузочных работ.
На практике приходится на основании заданного времени работы ПС на маршруте определять возможное количество ездок
 ,
,
где INT – функция, возвращающая ближайшее меньшее целое зна-
чение.
2.2. Маршруты, частота и интервал движения
подвижного состава
Маршрутом движения называется путь следования подвижного состава при выполнении перевозок. Выбираются такие маршруты, которые обеспечивают минимальные затраты на транспортирование грузов. В маршрут могут включаться грузы, перевозка которых возможна на одном и том же типе подвижного состава и которые совпадают по срокам предъявления к перевозке. Выбор маршрута зависит от дислокации погрузочно-разгрузочных пунктов и АТП, рода и размеров партий грузов, характеристик подвижного состава. Для маршрутизации движения применяются экономико-математические методы планирования перевозок.
Длина маршрута – это расстояние, которое проходит автомобиль от начального до конечного пункта; оборот подвижного состава – законченный цикл движения, т.е. движение по всему маршруту с возвращением в начальный пункт; интервал движения – промежуток времени между проездом любого пункта (места) маршрута двумя следующими друг за другом в одном направлении автомобильными тран-спортными средствами.
Маршруты движения подразделяются на маятниковые, радиальные, кольцевые, комбинированные, сборные, развозочные и сборно-развозочные (рис. 2.2).
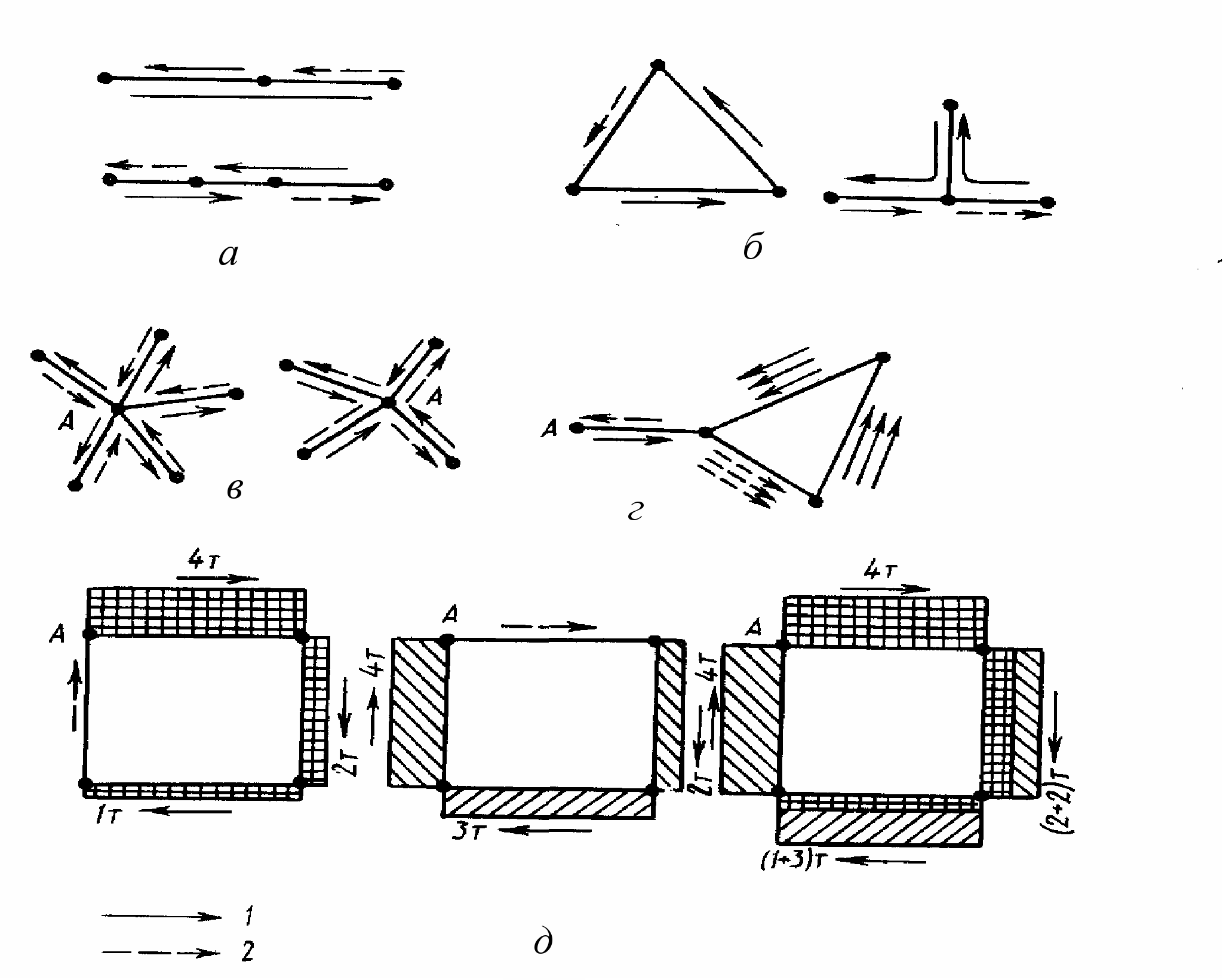
Рис. 2.2. Разновидности маршрутов перевозок грузов:
а – маятниковые (с частично обратно груженым пробегом и не пол-
ностью груженым прямым и обратным пробегом); б – кольцевые;
в – радиальные; г – комбинированный; д – сборный, развозочный
и сборно-развозочный; А – начальный пункт маршрута: 1 – движение
с грузом; 2 – движение без груза
Маятниковыми называются маршруты, когда движение подвижного состава в прямом и обратном направлениях происходит по одной и той же трассе. Они могут быть с полным использованием пробега, с использованием пробега только в прямом направлении, с неполным использованием пробега в прямом или обратном или в обоих направлениях. Разновидностью маятниковых маршрутов являются радиальные, которые имеют различные направления, но начинаются или заканчиваются в одном пункте.
Кольцевой маршрут движения – замкнутый контур, соединяющий пункты погрузки и разгрузки, когда пункт его начала является ко-
нечным.
Комбинированные маршруты – это сочетание нескольких маршрутов движения подвижного состава, в ходе которых за один оборот может быть совершено несколько ездок на некоторых из них.
Сборный, развозочный и сборно-развозочный – это маршруты, на которых подвижной состав, проходя погрузочно-разгрузочные пункты, постепенно загружается, разгружается или загружается или только разгружается.
2.3. Основные показатели работы
подвижного состава
Для планирования, учета и анализа работы подвижного состава грузового автомобильного транспорта применяется система показателей, которая характеризует степень его использования: во времени (дни, автомобиле-дни эксплуатации, коэффициент выпуска подвижного состава, время на маршруте и в наряде, время простоя под погрузкой-разгрузкой и коэффициент использования рабочего времени); по скоростным свойствам (техническая и эксплуатационная скорость движения); по пробегу (коэффициенты использования пробега за различные периоды времени работы на линии); по грузоподъемности (коэффициенты использования грузоподъемности статический и динамический). Кроме того, применяется ряд учетных показателей, отражающих результаты работы подвижного состава (средние длина ездки
и расстояние перевозки груза, число ездок, пробег с грузом, среднесуточный и общий пробег, производительность подвижного состава, объем перевозок и грузооборот).
Парк подвижного состава – это все транспортные средства (автомобили, тягачи, прицепы) автомобильного транспортного предприятия. Списочный (инвентарный) парк подвижного состава – парк, числящийся на балансе автомобильного транспортного предприятия в данный момент времени j. По своему техническому состоянию он подразделяется на парк, готовый к эксплуатации, Атj, и парк, находящийся в То и ремонтах, А р j : А с j = Атj+ А р j .
Часть Атj используется на перевозках – А э j , а другая часть находится в простое – А п j , т.е.
Атj = А э j + А п j ; Асj = А э j + А п j +А р j .
Каждая i- я единица парка подвижного состава в течение Дк i календарных дней находится в эксплуатации дней Дэ i , в ТО и ремонтах –
Др i дней и в простое в готовом к эксплуатации состоянии (выходные
и праздничные дни, отсутствие материалов и т.п.) – Дп i дней: Дк i =
= Дэ i + Др i + Дп i .
Для определения времени эксплуатации, ремонта или простоя парка подвижного состава используют показатель – автомобиле-дни:
 ,
,
где АД – суммарное число автомобиле-дней парка автомобилей в рассматриваемом состоянии; Д i – число дней нахождения в рассматриваемом состоянии на АТП i -го автомобиля за календарный период Д;
А¢ – число автомобилей за период Д(равно сумме их числа на начало календарного периода и числа поступивших за этот период или сумме их числа на конец периода и числа списанных); А j – число автомобилей в рассматриваемом состоянии на АТП в j -е сутки; Д – продолжительность календарного периода, сут.; АД k – суммарное число автомобиле-дней k -й группы автомобилей (например, одной грузоподъем-
ности); n – число групп автомобилей.
Время работы за календарный период характеризуется числом дней (для одной единицы) или автомобиле-дней (для парка) эксплуатации подвижного состава на линии. В течение рабочего дня каждый автомобиль определенный период находится в наряде, т.е., работая на линии, выполняет перевозку груза.
Использование подвижного состава за определенный период по календарному времени характеризуется также коэффициентом выпуска подвижного состава:
– для одного автомобиля за Д календарных дней
 ;
;
– для парка за Д календарных дней
 .
.
Техническое состояние парка подвижного состава характеризуется коэффициентом технической готовности:
– для одного автомобиля за Д календарных дней
 ;
;
– для парка за один рабочий день
 .
.
Коэффициент выпуска подвижного состава определяется уровнем коэффициента технической готовности:
aв = a т Д т K и /Д,
где K и – коэффициент, учитывающий снижение использования технически исправных автомобилей в рабочие дни парка по различным эксплуатационным и организационным причинам (K и = 0,93…0,97). Значение K и по конкретному АТП определяется по формуле
K и = aвД/(Д т a т),
где aв иa т – реально сложившиеся на АТП значения коэффициентов.
2.4. Использование грузоподъемности автомобиля;
длина ездки
Использование грузоподъемности подвижного состава характеризуется коэффициентами статического и динамического использования.
Коэффициент статического использования грузоподъемности gс – это отношение фактически перевезенного груза Q ф к грузу Q в, который можно было бы перевезти при условии полного использования грузоподъемности подвижного состава при груженых ездках  :
:
– за одну i -ю ездку
 ;
;
– за день (смену) для одного автомобиля
 ,
,
где q ф i – перевезенный груз за одну i- ю ездку, т; qi – номинальная грузоподъемность автомобиля, которым выполнена i- я ездка с грузом, т; gc i – коэффициент статического использования грузоподъемности при i- й ездке с грузом; z e – общее число ездок с грузом.
Коэффициент динамического использования грузоподъемности gд – это отношение фактически выполненной Р ф транспортной работы
к возможной Р впри условии полного использования грузоподъемности подвижного состава на протяжении всего пробега с грузом: gд = Р ф / Р в. Здесь в отличие от gс учитывается не только количество груза, но и расстояние перевозки.
Коэффициент динамического использования грузоподъемности:
– за одну ездку
 ;
;
– за день (смену) для одного автомобиля
 .
.
Пробег – расстояние, которое проходит автомобиль за определенный период времени. Он может быть производительным (с грузом) и непроизводительным (без груза). Последний подразделяется на порожний (от пункта разгрузки до следующего пункта загрузки) и нулевой (от АТП до первого пункта погрузки и от последнего места разгрузки до АТП). Нулевыми считаются также все заезды, не связанные с выполнением транспортного процесса (заправка, ТО, ТР). Если обозначить нулевой пробег через L н, а пробег, связанный с выполнением транспортного процесса, через L м, то общий пробег L = L н + L м.
Автомобиль работает на маршруте время Т м и затрачивает на нулевой пробег время t н. Но так как L м = L г + L х, L = L г + L х + L н, где Lr
и L х – соответственно пробег автомобилей с грузом и порожний (холостой), км.
Коэффициент использования пробега подвижного состава – отношение производительного пробега к общему за определенный период  :
:
– за одну i -ю ездку
 ;
;
– за z e ездок
 ,
,
где lri, lxi – соответственно пробег с грузом и без груза при i -й ездке автомобилей, км; z e – общее число выполненных ездок.
Среднее расстояние перевозки lq – это средняя дальность транспор-тирования одной тонны груза, определяется отношением выполненной транспортной работы Р к объему перевезенного груза Q: lq = P / Q.
Средняя длина ездки с грузом – это средний пробег, совершаемый автомобилем за одну ездку от пункта погрузки до пункта разгрузки; определяется отношением общего груженого пробега к соответствующему числу выполненных ездок, т.е.  .
.
2.5. Скорость движения, производительность
автомобиля
Общее время простоя подвижного состава под погрузкой-разгрузкой за одну ездку t пр включает: ожидание погрузки-разгрузки; маневрирование ПС в пунктах погрузки-разгрузки; выполнение непосредственно погрузочно-разгрузочных работ; оформление товарно-транспортных документов.
Время непосредственного выполнения погрузочно-разгрузочных работ является основным элементом времени простоя. Оно складывается из времени, затрачиваемого на открытие и закрытие бортов и дверей кузова, увязку груза, укрепление брезента, взвешивание и пересчет груза, навешивание пломбы и т.д. Общее время простоя определяется предельными нормами простоя подвижного состава под погрузкой-разгрузкой. Эти нормы устанавливаются тарифами на грузовые перевозки.
Среднее значение времени простоя под погрузкой-разгрузкой на одну ездку с грузом
 ,
,
где АТ пр – суммарные автомобиле-часы простоя подвижного состава под погрузкой-разгрузкой за z e ездок с грузом; t (пр) i – простой автомобиля под погрузкой-разгрузкой за i -ю ездку с грузом.
Скорости движения подвижного состава при перевозках принято характеризовать технической и эксплуатационной скоростями.
Техническая скорость – представляет собой среднее значение скорости за время движения подвижного состава и выражается отношением пройденного расстояния L к автомобиле-часам движения АT дв: vт =
= L / (АT дв).
Величина АТ дв включает продолжительность кратковременных остановок, связанных с регулированием движения (у светофора, у переездов и т.п.).
За одну i -ю ездку vт = l e i / t дe i ;
за несколько ездок  ,
,
где l e i – длина полной ездки автомобиля (ездки с грузом l г i и сле-
дующей за ней ездки без груза l x i , км); t дe i – время движения за полную ездку, ч.
Техническая скорость зависит от динамических свойств подвижного состава, степени использования грузоподъемности, дорожных условий, интенсивности движения, частоты и продолжительности остановок, связанных с регулированием движения. Нормативы технической скорости движения для автомобильного транспорта установлены в зависимости от типа дорожного покрытия и грузоподъемности подвижного состава: при работе за городом – 49 км/ч на дорогах с усовершенствованным покрытием (асфальтобетонным, цементно-бетонным, гудронированным); 37 км/ч на дорогах с твердым покрытием (булыжным, щебеночным, гравийным) и грунтовых улучшенных; 28 км/ч на дорогах грунтовых естественных; при работе в городе – 25 км/ч (для автомобилей и тягачей грузоподъемностью до 7 т и цистерн вместимостью до 6 тыс. л) и 24 км/ч (грузоподъемностью 7 т и цистерн вместимостью 6 тыс. л и выше).
Эксплуатационная скорость – это условная средняя скорость подвижного состава за время его нахождения на линии; определяется отношением пройденного расстояния L к суммарному времени нахождения в наряде А Т н:
 или
или  ,
,
где l с – среднесуточный пробег автомобиля, км; Т н – среднее время нахождения автомобиля в наряде, ч.
Кроме технической и эксплуатационной, пользуются скоростью доставки грузов. Последняя является условной средней скоростью движения грузов. Она определяется отношением расстояния перевозки ко времени нахождения автомобиля в пути с момента окончания погрузки до момента начала выгрузки.
Производительность грузового автомобильного транспортного средства определяется количеством выполненных тонно-километров или перевезенных тонн груза в единицу времени. Наиболее часто при расчетах пользуются часовой и суточной производительностью единицы подвижного состава.
Поскольку за средневзвешенную ездку единицы подвижного состава перевозится Q e = q gc тонн груза и выполняется P e = q gд l eг тонно-километров, то часовые производительности WQ и WP составят:
 ; и
; и  ,
,
где t e – среднее время одной полной ездки, ч (определяется по формуле t e = t дe + t пр).
Суточная производительность автомобильного транспортного средства равна произведению часовой производительности на время в наряде
 и
и  ,
,
где Q са и P са – соответственно суточная производительность грузового автомобильного транспортного средства, т и тонна-километров.
Т е м а 3
ПЛАНИРОВАНИЕ ПЕРЕВОЗОК ГРУЗОВ
3.1. Принципы планирования грузовых перевозок
Планирование грузовых перевозок подразделяется на перспективное, текущее и оперативное.
Перспективное (стратегическое) планирование включает в себя разработку основных направлений и показателей деятельности на длительный период от 5 до 15 лет. При этом расчеты выполняются на основании прогнозов развития экономических и социальных процессов в регионе и анализа рыночной конъюнктуры.
Текущее планирование составляется на год. В этом случае возможный объем работы и необходимые для его выполнения ресурсы рассчитываются на основании имеющихся и подготовленных к заключению договоров. При расчете ресурсов используют коэффициент запаса, который должен учитывать выработку ресурса ПС и возможность выполнения внеплановых заказов.
При составлении годового плана работы АТО рассчитываются следующие показатели (по типам ПС): 1) коэффициент выпуска и использования парка АТС; 2) автомобиле-дни в работе; 3) возможные объемы перевозок; 4) годовой пробег, в том числе с грузом; 5) требуемые ресурсы для поддержания АТС в работоспособном состоянии; 6) расход топлива и ГСМ; 7) себестоимость перевозок.
Оперативное планирование – это конкретизация плановых заданий по времени выполнения, в пространстве (по местам выполнения производственных заданий), по специфике технологии и организации производства управляемого объекта (структура ПС, ПРМ, выбор технологии и т.д.). Оперативное планирование включает в себя разработку планов работы в целом АТО и конкретных АТС и водителей на месяц, неделю и смену. В процессе оперативного планирования решаются следующие задачи:
· расчет провозных возможностей АТО;
· расчет оптимальных маршрутов движения ПС;
· составление почасовых графиков работы ПС;
· составление плана работ по клиентуре;
· расчет предполагаемых затрат и необходимых ресурсов для выполнения перевозок;
· составление сменно-суточного плана работы АТО, графика выпуска ПС на линию и оформление путевой документации.
Основным документом оперативного планирования является сменно-суточный план.
Сменно-суточный план при сдельном использовании ПС включает в себя следующие показатели: номер заявки или договора на перевозку; наименование заказчика; наименование груза, расстояние и объем перевозки; пункт погрузки и пункт выгрузки груза, способ выполнения ПРР; время подачи ПС под первую погрузку; количество выделенных АТС по маркам по плану и фактически (фактические показатели заполняются после обработки путевой документации); объем выполненной работы (количество ездок, перевезенных тонн груза, общий пробег и пробег с грузом).
При повременном использовании ПС в сменно-суточном плане отражается время предоставления и продолжительность работы АТС у заказчика по маркам ПС.
3.2. Задачи оптимизации и их место
в планировании перевозок
Одним из главных путей повышения эффективности работы AT является выбор из множества вариантов использования АТС оптимального, т.е. наилучшего. В зависимости от вида решаемой задачи принимается показатель, для которого стремятся найти наилучшее значение (например, минимальный пробег АТС, максимальная прибыль и т.д.). Такой показатель называется критерием оптимальности и является функцией независимых параметров (исходных данных) задачи F = F (x 1, x 2,..., хп).
Показатели и характеристики, на значения которых наложены ограничения, являются также функциями независимых параметров и называются функциями ограничений, которые могут задаваться в виде равенств и неравенств:
Ri = Ri (х 1, х 2,..., хn)= 0; Ri = Ri (х 1, х 2,..., хn)£0; xk £ 0.
Совокупность формул, позволяющая для заданного набора значений параметров х 1, х 2, ..., хn рассчитать значения функций ограничений и критерия оптимальности, называется математической моделью.
Для получения оптимальных решений применяют различные математические методы. В связи с тем, что в качестве критерия оптимальности, как правило, используют экономические показатели, такие методы носят название экономико-математических. Классификация методов, применяемых при оптимизационном планировании перевозок, представлена на рис. 3.1.
Рис. 3.1. Классификация основных методов оптимального
планирования перевозок
Линейное программирование – это математическая дисциплина, с помощью которой выполняются анализ и решение экстремальных задач с линейными связями и ограничениями. Здесь термин «программирование» является синонимом термина «планирование», т.е. подразумевается составление плана оптимального решения задачи.
Таким образом, экономическое содержание задач линейного программирования – отыскание наилучших способов использования наличных ресурсов, когда условия задачи выражаются системой линейных уравнений, содержащих неизвестные только первой степени. Многие задачи планирования грузовых автоперевозок имеют именно такое содержание. Например, закрепление грузополучателей (ГПП) за грузоотправителями (ГОП), распределение автомобилей по объектам
и маршрутам и т.д.
В математической форме общая задача линейного программирования состоит в максимизации или минимизации линейной функции
F= с 1 х 1 + с 2 х 2 +... + спхп
от п вещественных переменных х 1, х 2,. .., хп ,удовлетворяющих условиям неотрицательности (х 1 > 0, х 2> 0,..., хп > 0) и т линейным ограничениям

Среди ограничений могут одновременно встречаться знаки «³», «£» и «=». Значения сi, аij, bj предполагаются известными.
К математическому программированию относятся также и методы нелинейного программирования. Соответствующие задачи в этом случае описываются нелинейными уравнениями. Для решения задач, относящихся к классу задач нелинейного программирования, приходится применять сложные алгоритмы, на практике реализуемые только при помощи ЭВМ.
Некоторые задачи планирования грузовых автоперевозок связаны
с принятием ряда последовательных и поэтапных решений. Для решения таких задач используются методы динамического программирования, в основе которых лежит совокупность приемов, позволяющих находить оптимальные решения, основанные на вычислении последствий каждого из принятых решений и выработке оптимальных стратегий для последующего решения.
В решении планово-экономических задач находят также применение методы, базирующиеся на теории вероятностей, математической статистике и теории массового обслуживания. При построении стохастических моделей исходят из вероятностной трактовки экономического процесса и его параметров. При этом каждой входящей в модель величине приписывается не одно какое-либо число, а указывается вероятностный закон распределения значений этой величины и характеристики этого распределения (математическое ожидание, дисперсия и т.д.).
3.3. Моделирование транспортных сетей
и расчет кратчайших расстояний
При планировании перевозок возникает необходимость в определении кратчайших расстояний между АТО, пунктами потребления и пунктами отправления грузов. Расстояния между пунктами являются основой для оплаты клиентами транспортных услуг, учета расхода топлива, определения грузооборота АТО, расчета заработной платы водителей и т.д.
Множество всех дорог города или района составляют дорожную сеть. Транспортная сеть – это совокупность дорог региона, пригодных для движения заданных транспортных средств. Транспортная сеть всегда является частным случаем дорожной сети и, как правило, строится для различных типов транспортных средств.
Модель транспортной сети может быть представлена в виде графа. Граф – это фигура, состоящая из точек (вершин) и соединяющих их отрезков (звеньев). Вершины графа – это точки на сети, наиболее важные для определения расстояний или маршрутов движения.
Звенья графа – это отрезки транспортной сети, характеризующие наличие дорожной связи между соседними вершинами. Звенья графа характеризуются числами, которые могут иметь различный физический смысл. Чаще всего это расстояние, но может использоваться, например, и время движения или стоимость проезда. Ориентированные по направлению звенья графа называются дугами.
Моделирование транспортной сети начинают с размещения вершин графа. За вершины графа принимают ГОП, ГПП, центры крупных жилых кварталов или небольших обособленных жилых пунктов и пересечения улиц. Каждой вершине присваивается порядковый номер или другое условное обозначение. После размещения вершин их связывают дугами или звеньями.
Сформулируем задачу о кратчайшем пути. Пусть дан связанный граф, имеющий R вершин и N ориентированных дуг, причем каждой дуге поставлено в соответствие неотрицательное число Сij, называемое ее длиной. Требуется найти на графе кратчайшие пути и их длины от заданной вершины i 0 до всех остальных вершин. В каждую вершину графа может входить только одна дуга, принадлежащая какому-нибудь кратчайшему пути.
Все алгоритмы решения этой задачи являются итерационными (повторяющимися), в которых на каждой итерации корректируется уже построенное множество кратчайших путей между вершинами графа.
Метод потенциалов для определения кратчайших расстояний заключается в следующем. Начальной вершине сети, за которую может быть принята любая из вершин, присваивают потенциал, равный нулю. Затем определяют потенциалы соседних с начальной точкой вершин сети. Значение потенциала равно расстоянию до вершины. Выбирают наименьший потенциал и присваивают его соответствующей вершине. Затем вычисляют потенциалы вершин, соседних с выбранной, и снова выбирают наименьший потенциал и присваивают его соответствующей вершине и т.д.
Полное решение задачи включает в себя столько шагов, сколько вершин имеет транспортная сеть, поскольку на каждом шаге определяют потенциал или кратчайшее расстояние от начальной точки до одной из вершин сети.
3.4. Формулировка транспортной задачи
Оптимальное закрепление поставщиков однородного груза за потребителями, т.е. нахождение оптимальных грузопотоков, является классическим примером транспортной задачи. Эта задача возникает, когда несколько поставщиков имеют однородный груз, который в определенных объемах должен быть доставлен потребителям.
Суть транспортной задачи линейного программирования состоит в следующем. В пунктах отправления А 1, А 2,..., Ап имеется однородный груз в количестве а 1, а 2,..., ап. Этот груз необходимо доставить в пункты потребления В 1, В 2, ..., Вт в количестве b 1, b 2,..., bт. Известны кратчайшие расстояния сij, между всеми пунктами отправления и получения груза. Необходимо построить план перевозок таким образом, чтобы была удовлетворена потребность в грузе всех пунктов потребления, был вывезен весь груз из пунктов производства и при минимуме транспортной работы в тонна-километрах.
Экономико-математическая модель транспортной задачи выглядит следующим образом. Система ограничений по количеству груза, доставляемого в пункты потребления:
Система ограничений по количеству груза, вывозимого из каждого пункта производства:
где xij – объем перевозок между i -и и j -й точками транспортной сети;
i – количество поставщиков; j – количество потребителей; аi – ограничения по предложению; bj – ограничения по спросу.
Причем предполагается, что  , так как это необходимо для совместимости системы уравнений. Общий объем транспортной работы (стоимости перевозок) должен быть минимальным. Поэтому целевая функция выглядит следующим образом:
, так как это необходимо для совместимости системы уравнений. Общий объем транспортной работы (стоимости перевозок) должен быть минимальным. Поэтому целевая функция выглядит следующим образом:  , где xij ³ 0.
, где xij ³ 0.
Математическая постановка задачи показывает, что задача закрепления поставщиков за потребителями относится к классу задач линейного программирования, называемой транспортной задачей линейного программирования. Условия транспортной задачи обычно представляются в виде матрицы, образец которой приведен в табл. 3.1.
Т а б л и ц а 3.1
Матрица условий транспортной задачи
| ГОП | ГПП | Итого | ||
| В 1 | В 2 | В 3 | ||
| А 1 | с 11 | с 12 | с 13 | а 1 |
| А 2 | с 21 | с 22 | с 23 | а 2 |
| Итого | b 1 | b 2 | b 3 |
3.5. Методы решения транспортной задачи
Учитывая специфику транспортной задачи, для ее решения наиболее эффективными оказались специальные методы, позволяющие найти оптимальное решение. Одним из таких методов является распределительный метод, в основе которого лежит принцип последовательного улучшения плана. Сначала определяется первоначальное допустимое решение, затем решение проверяется на оптимальность и при необходимости улучшается. Процесс продолжается до тех пор, пока не будет получено оптимальное решение. Первоначальное допустимое распределение может быть получено несколькими способами. Рассмотрим один из них.
Построение допустимого первоначального плана методом северо-западного угла начинается с заполнения левой верхней клетки матрицы и заканчивается в ее правой нижней клетке. Груз, имеющийся у первого поставщика, распределяется так, чтобы сначала по возможности полностью удовлетворить потребности первого потребителя, потом второго и т. д. Затем переходят к распределению груза, имеющегося у второго поставщика, и так до полного распределения груза у всех поставщиков. Если спрос какого-либо потребителя превышает наличие груза у поставщика, то недостающий спрос удовлетворяют за счет следующего поставщика.
Для проверкиоптимальности полученного распределенияперевозок используют вспомогательные показатели для строк u и столбцов v, называемые потенциалами. Для каждой загруженной клетки сумма соответствующих этой клетке потенциалов должна быть равна расстоянию между пунктами, указанному в этой клетке. В соответствии с этим потенциалы можно определить по следующему правилу. Одному из столбцов или строк присваивается потенциал, равный нулю. Это может быть любой столбец или строка, но целесообразно приравнять к нулю потенциал того столбца (или строки), в котором содержится загруженная клетка с наибольшим расстоянием между пунктами.
Затем определяем потенциалы остальных столбцов и строк, исходя из того, что иi + vj = сij,при этом определяем потенциалы только строк и столбцов, содержащих загруженные клетки. Для того чтобы определить потенциалы всех столбцов и строк в матрице, необходимо, чтобы матрица содержала не менее (п + т – 1) загруженных клеток. Если количество загруженных клеток меньше, чем (п + т – 1), необходимо искусственно загрузить недостающее количество клеток матрицы, для чего в эти клетки записывается нулевая загрузка. Ноль следует приписывать той клетке, которая лежит на пересечении строки или столбца, не имеющих потенциала, со строкой или столбцом, потенциал которых уже определен. В этом случае будет возможно определить еще неопределенный потенциал строки или столбца.
Если потенциалы во всех незагруженных клетках меньше, чем расстояние между пунктами в этой же клетке, то найденное распределение плана перевозок является оптимальным.
Следующим этапом в построении оптимального плана распределения загрузок является этап улучшения полученного распределения.
Для оптимизации первоначального допустимого плана перевозок необходимо построить контур для наиболее потенциальной клетки. Будем считать наиболее потенциальной такую клетку, для которой разность между вычисленным потенциалом клетки и соответствующим этой клетке расстоянием является максимальной.
Контуром называется замкнутая ломаная линия, образованная прямыми отрезками, углы соединений между которыми равны 90°. Строится контур так, чтобы все углы, кроме одного, располагались
в загруженных клетках, а один угол находился в незагруженной, наиболее потенциальной клетке. От выбранной незагруженной клетки проводят прямую линию по строке или столбцу до загруженной клетки, которой в свою очередь должна соответствовать еще одна загруженная клетка, расположенная под прямым углом, и так до тех пор, пока контур не замкнется в исходной клетке. Такой контур может быть только один!
Виды контуров могут быть весьма разнообразными (рис. 3.2). Но число вершин контура всегда должно будет четным. При этом те клетки, где горизонтальные и вертикальные линии пересекаются, вершинами контура не считаются. Вершиной контура является лишь та ячейка, где эти линии образуют прямой угол.
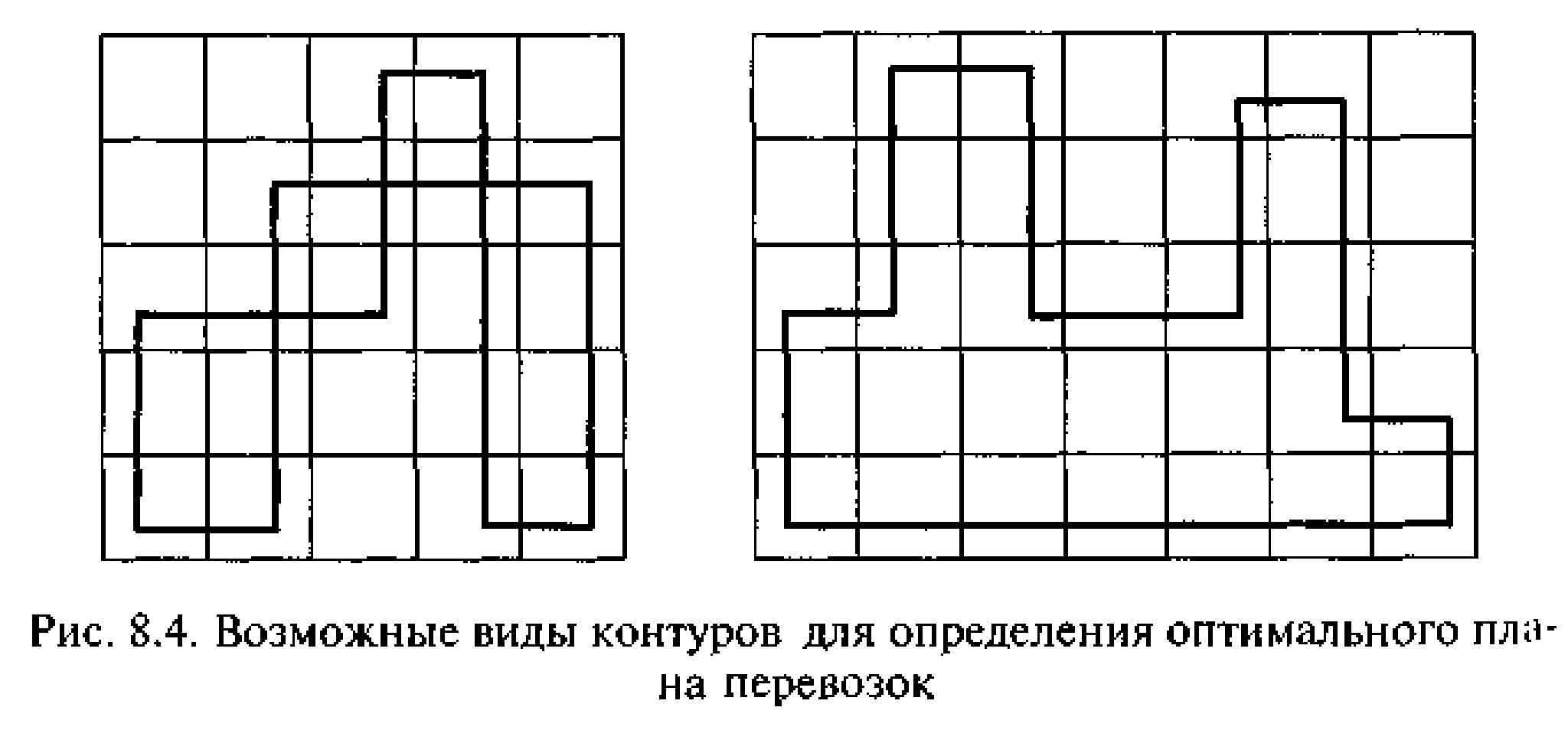
Рис. 3.2. Возможные виды контуров для определения
оптимального плана перевозок
После того как контур построен, всем вершинам контура присваиваются попеременно знаки «+» и «–». Начинать надо с клетки, выбранной для начала построения контура (это незагруженная клетка), ей присваивается знак «–».
Затем из всех клеток, обозначенных знаком «+», выбирают наименьшую загрузку. Величину этой загрузки вычитают из величины загрузки во всех клетках, помеченных знаком «+», и прибавляют к величине загрузки в клетках со знаком «–». В результате этих действий наиболее потенциальная клетка становится загруженной, а одна (или несколько) загруженных клеток становятся свободными.
Полученное распределение загрузок записывают в новую матрицу. Для вновь полученного распределения загрузок снова проводят проверку на оптимальность, и, если полученный вариант не является оптимальным, опять производят улучшение плана загрузок. Процесс продолжается до тех пор, пока не будет получено оптимальное распределение загрузок.
Т е м а 4
Автомобильные грузовые транспортные
средства
4.1. Классификация и система обозначений
Автомобильные грузовые транспортные средства (автомобили) классифицируются по назначению, конструктивной схеме, размерности, виду перевозок, типу кузова, исполнению и подразделяются на дорожные и внедорожные автомобили.
Для дорожных автомобилей, используемых на дорогах с усовершенствованными капитальными покрытиями, предельно допустимая осевая нагрузка от одиночной наиболее нагруженной оси должна быть не более 10 т (при расстоянии до смежной оси 2,5 м и более), а для автомобилей, эксплуатируемых на всей сети дорог без ограничений, – не более 6 т.
Внедорожные автомобильные средства предназначаются для перевозок по специально построенным карьерным, лесовозным или другим дорогам, а также вне сети дорог.
В зависимости от назначения автомобили всех видов подразделяются на транспортные (для перемещения грузов или пассажиров) и специального назначения (пожарные, коммунального хозяйства, автокраны, санитарные, скорой медицинской и технической помощи, спортивные и др.).
Транспортные автомобили и автопоезда делятся на грузовые и пассажирские. Грузовые автомобильные транспортные средства по конструктивной схеме подразделяются на одиночные и автопоезда – автомобили-тягачи с прицепом или седельные тягачи с полуприцепом.
Одним из основных классификационных подразделений каждого из видов грузовых автомобилей является их градация по размерности, которая зависит от грузоподъемности или полной массы автомобиля. Для потребителей наиболее показательна классификация по номинальной грузоподъемности (т.е. полезной нагрузке, установленной изготовителем). Грузовой подвижной состав по грузоподъемности можно разделить на пять групп: особо малая – до 0,5 т (на базе легковых автомобилей); малая – 0,5…2,0; средняя – 2,0…5,0; большая – 5,0…15,0; особо большая – 15,0 т и более. Грузоподъемность автопоезда складывается из грузоподъемности автомобиля-тягача и прицепов.
Все грузовые автомобили и автопоезда также подразделяются: по виду перевозок – на местные и междугородные; по типу кузова – на универсальные и специализированные. К последним относятся самосвалы, фургоны, цистерны, контейнеро-, панеле-, лесо-, цементовозы и т.п.; по климатическому исполнению – северное, тропическое, горное; по типу двигателя – карбюраторные, дизельные, газобаллонные; по проходимости – обычные, повышенной и высокой проходимости.
Тягачи делятся на автомобили-тягачи, седельные тягачи и буксирные, а прицепной состав – на прицепы-тяжеловозы, активные прицепы и полуприцепы.
Система обозначения (индексация) заключается в следующем. Каж-дой модели автомобиля присваивается индекс, состоящий из четырех цифр (первая обозначает размерность, вторая – тип, третья и четвертая – модель). Модификация определяется пятой цифрой, исполнение – шестой.
Индекс прицепного состава включает также четыре цифры (первая цифра обозначает прицеп – 8 или полуприцеп (роспуск) – 9; вторая – тип кузова, а две последующие – модель с учетом полной массы прицепного средства).
Перед цифровым индексом ставится марка завода-изготовителя.
Вторая цифра индекса грузовых автомобилей и прицепного состава зависит от типа кузова: бортовые платформы – 3, седельные тягачи – 4, самосвалы – 5, цистерны – 6, фургоны – 7, специальные автомобили – 9.
Для прицепного состава выделено пять групп индексов моделей (табл. 4.1).
Т а б л и ц а 4.1

