 2014-02-02
2014-02-02 9475
9475Позиционные звенья
Глава 3. Основные типовые динамические звенья систем автоматического управления и регулирования
Сложные линейные системы автоматического регулирования и управления удобнее и проще изучать, если их представить в виде совокупности соединенных между собой нескольких несложных элементов с определенными динамическими характеристиками. Реальные элементы, используемые в системах автоматики, могут иметь самые различные конструктивные выполнения и разнообразную физическую основу (тепловую, механическую, электрическую, гидравлическую и т.д.), но описываться одним и тем же дифференциальным уравнением. Следовательно, они обладают идентичными динамическими свойствами. Исходя из идентичности динамических свойств, реальные элементы можно отнести к определенному типу звеньев, что позволяет свести все многообразие реальных элементов систем регулирования к небольшому числу так называемых типовых динамических звеньев.
Типовые динамические звенья являются основными составными частями структурных схем непрерывных систем регулирования и управления, поэтому знание их характеристик существенно облегчает анализ таких систем.
Типовые динамические звенья различают по виду их дифференциального уравнения (или передаточной функции), определяющего все их динамические свойства и характеристики.
В теории автоматического регулирования принято классифицировать звенья по характеру переходного процесса, возникающего при подаче на вход звена однократного ступенчатого воздействия (единичного).
Основные типы звеньев можно разделить на четыре группы: позиционные, интегрирующие, дифференциальные и звено с чистым запаздыванием.
В этих звеньях выходная величина после нанесения однократного ступенчатого воздействия на входе с течением времени устанавливается на новом значении (меняет позицию). К этой группе звеньев относятся: пропорциональные (усилительные, безынерционные) звенья; апериодическое (инерционное) звено первого порядка; апериодическое (инерционное) звено второго порядка и колебательное звено.
Поведение звеньев в динамике характеризуется видом дифференциального уравнения, передаточной функцией, динамической характеристикой (переходная функция, кривая разгона), частотными характеристиками. Будем в этом порядке рассматривать характеристики звеньев.
В литературе эти звенья часто называют усилительными или безинерционными.
Пропорциональное звено является простейшим среди всех типовых звеньев. Оно передает сигнал со входа на выход мгновенно, без искажения его формы. В звене может происходить только усиления или ослабление мгновенных значений входной величины.
Связь между мгновенными значениями входной величины х вх(t) и выходной величины х вых(t) описывается алгебраическим уравнением
 . (3.1)
. (3.1)
Передаточные свойства определяются одним параметром – передаточным коэффициентом k (коэффициентом усиления).
При однократном ступенчатом воздействии х вх(t), приложенном в момент времени t 0, выходная величина мгновенно изменяется и принимает значение  – рис. 3.1.
– рис. 3.1.
Отсчет текущего времени t начинается с момента нанесения воздействия t 0, что соответствует смещению оси ординат на рис. 3.1 в точку t 0 (t =0)
| Рис. 3.1. Разгонная характеристика пропорционального звена |
Если воздействие на звено не ступенчатое, а задано некоторым законом х вх(t), то изменение выходной величины х вых(t) происходит одновременно с изменением х вх(t), а по величине остается пропорциональными ему.
Передаточная функция звена получается из записи уравнения в операторном виде
 ;
;  (3.2)
(3.2)
и равна коэффициенту передачи k.
Частотные характеристики звена получаются из передаточной функции (3.2). Заменой оператора р величиной j w перейдем к частотной передаточной функции
 , (3.3)
, (3.3)
которая имеет только действительную составляющую  (мнимая составляющая
(мнимая составляющая  ). Тогда амплитудно-частотная характеристика звена А (w) равна
). Тогда амплитудно-частотная характеристика звена А (w) равна
 , (3.4)
, (3.4)
а фазочастотная характеристика j(w) будет
 , (3.5)
, (3.5)
т.е. сдвига по фазе нет.
Из частотных характеристик следует, что в этом звене сигналы любой частоты (от нуля до бесконечности) проходят с одинаковым отношением амплитуд выходной и входной величин, равным k.
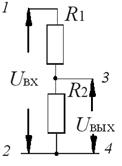
Примерами пропорционального (безынерционного) звена могут служить: рычаги для передачи усилий или перемещений (рис. 3.2, а); зубчатые передачи, используемые в редукторах различного типа, в том числе и в исполнительных механизмах (рис. 3.2, б); делитель напряжений (рис. 3.2, в); потенциометрические датчики углового перемещения (рис. 3.2, г); усилители различного типа (рис. 3.2, д).
 |  |  |
| а | б | в |
 |  | |
| г | д | |
| Рис. 3.2. Примеры пропорциональных звеньев |
Перемещение h 2 (рис. 3.2, а) зависит от соотношения плеч рычага l 1 и l 2 и величины входного перемещения h 1 ( ). Коэффициент передачи (усиления) рычага k р= l 2/ l 1.
). Коэффициент передачи (усиления) рычага k р= l 2/ l 1.
Угловая скорость зубчатой передачи w2 зависит от соотношения числа зубьев на малой и большой шестернях z 1 и z 2 и величины угловой скорости малой шестерни w1 ( ). Коэффициент передачи
). Коэффициент передачи  (рис. 3.2, б).
(рис. 3.2, б).
Выходное напряжение U вых (рис. 3.2, в) зависит от соотношения сопротивлений электрической цепочки R 1 и R 2 и величины входного напряжения U вх ( ). Коэффициент передачи делителя
). Коэффициент передачи делителя  .
.
Передаточный коэффициент потенциометрического датчика перемещения зависит от напряжения U 0, подводимого от внешнего источника к зажимам 1 – 2 потенциометра, и величины полного хода движка потенциометра φ0  , а коэффициент передачи усилителя (рис. 3.2. д) – от отношения выходного и входного напряжений (
, а коэффициент передачи усилителя (рис. 3.2. д) – от отношения выходного и входного напряжений ( ).
).
Понятие пропорционального (безынерционного) звена является продуктом математической идеализации. Все реальные конструктивные элементы автоматических систем обладают некоторой инерционностью, так как передача энергии со входа на выход элемента не может осуществляться мгновенно. Однако, если инерционность того или иного элемента на два-три порядка меньше, чем у остальных элементов рассматриваемой системы, то его считают безынерционным звеном. Так, например, для тепловых объектов управления, инерционность которых может быть очень большой, датчики давления, расходов и даже датчики температуры могут считаться безынерционными (пропорциональными) звеньями.








