 2015-02-24
2015-02-24 2373
2373КРАТКАЯ ТЕОРИЯ. Совокупность связанных между собой тел, способных совершать колебания, называют колебательной системой. Рассмотрим простейшую колебательную систему - пружинный маятник (рис.1). Он представляет собой груз массой  , подвешенный на упругой пружине. Будем считать, что масса пружины мала по сравнению с массой груза.
, подвешенный на упругой пружине. Будем считать, что масса пружины мала по сравнению с массой груза.
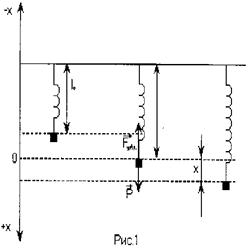 | Если первоначальная длина пружины без груза -  , то при подвешивании груза она растягивается до величины , то при подвешивании груза она растягивается до величины  , называемой статическим удлинением пружины. Когда маятник находится в состоянии равновесия, вес груза уравновешивается силой упругости пружины: , называемой статическим удлинением пружины. Когда маятник находится в состоянии равновесия, вес груза уравновешивается силой упругости пружины:  , (1), что дает возможность определить жесткость пружины статическим методом. , (1), что дает возможность определить жесткость пружины статическим методом. |
Выведем груз из положения равновесия вниз на расстояние, равное х. Если при этом удлинение пружины не слишком велико и выполняется закон Гука, то результирующая сила, действующая на груз, находящийся в этом положении, будет равна:

или с учетом соотношения (1):
 . (2)
. (2)
Знак минус указывает на то, что смещение и сила имеют противоположные направления.
Таким образом, результирующая сила при смещении груза из положения равновесия пропорциональна величине смещения и всегда направлена к положению равновесия. Так как эта сила стремится возвратить груз в положение равновесия, то ее называют возвращающей силой, а коэффициент пропорциональности в (2),соответствующий величине силы, вызывающей единичную деформацию, коэффициентом возвращающей силы или жесткости пружины. Очевидно, что в пружинном маятнике роль возвращающей силы играет сила упругости. Отметим, что если силы, действующие в системе, по своей природе не являются упругими, но описываются уравнением (2), то они называются квазиупругими силами. Колебания, совершающиеся под действием только упругих или квазиупругих сил, называются собственными колебаниями.
Если груз, выведенный из положения равновесия на небольшое расстояние  , отпустить, то он будет совершать колебания в вертикальной плоскости. За малый промежуток времени (порядка нескольких секунд) работа сил сопротивления невелика, поэтому уменьшением амплитуды колебаний можно пренебречь и считать, что маятник совершает собственные колебания с периодом
, отпустить, то он будет совершать колебания в вертикальной плоскости. За малый промежуток времени (порядка нескольких секунд) работа сил сопротивления невелика, поэтому уменьшением амплитуды колебаний можно пренебречь и считать, что маятник совершает собственные колебания с периодом  (минимальный промежуток времени, в течение которого колебания повторяются). Если
(минимальный промежуток времени, в течение которого колебания повторяются). Если  полных колебаний совершается за время
полных колебаний совершается за время  , то период
, то период
 .
.
Движение груза описывается, согласно второму закону Ньютона, следующим соотношением:
 (3)
(3)
или
 , (4)
, (4)
Где
 (5)
(5)
есть собственная угловая (циклическая) частота системы – число колебаний за время 2p с. Уравнение (4) - дифференциальное уравнение гармонических колебаний, решение которого представляется гармонической функцией:
 , (6)
, (6)
определяющей смещение х от положения равновесия как функцию времени. Здесь  - амплитуда колебаний или модуль максимального отклонения тела от положения равновесия. Так как:
- амплитуда колебаний или модуль максимального отклонения тела от положения равновесия. Так как:
 ,
,
то из (5)следует:
 .
.
Тогда жесткость пружины динамическим методом определяется по формуле:
 . (7)
. (7)
Если время, в течение которого совершаются колебания, велико по сравнению с периодом колебаний, то на движение колеблющегося груза существенным образом будет сказываться действие сопротивления воздуха, вследствие чего амплитуда колебаний будет со временем уменьшаться. Такие колебания называются затухающими.
При сравнительно малых скоростях сопротивление можно считать прямо пропорциональным скорости движения колеблющегося тела:
 .
.
Знак «минус» указывает на то, что сила сопротивления (трения) направлена против смещения, а величина  представляет собой коэффициент сопротивления движению маятника. Поэтому для затухающих колебаний уравнение движения груза будет иметь вид:
представляет собой коэффициент сопротивления движению маятника. Поэтому для затухающих колебаний уравнение движения груза будет иметь вид:
 . (8)
. (8)
Это уравнение приводится к виду:
 , (9)
, (9)
где d - коэффициент затухания, равный
 (9’).
(9’).
Уравнение (9) есть дифференциальное уравнение затухающих колебаний, при которых коэффициент затухания меньше собственной циклической частоты:
 .
.
Решение уравнения (9) представляется функцией:
 . (10)
. (10)
Здесь  - круговая частота свободных (затухающих) колебаний, равная:
- круговая частота свободных (затухающих) колебаний, равная:
 . (11)
. (11)
Таким образом, частота затухающих колебаний меньше частоты собственных колебаний системы.
Согласно (10) амплитуда колебаний убывает по экспоненциальному закону:
 , (12)
, (12)
где - начальная амплитуда колебаний,  - амплитуда колебаний в момент времени .
- амплитуда колебаний в момент времени .
Отношение двух амплитуд, отстоящих на период, называют декрементом затухания:
 .
.
Натуральный логарифм отношения этих амплитуд называют логарифмическим декрементом затухания:
 . (13)
. (13)
Для повышения точности измерения логарифмического декремента затухания обычно измеряют амплитуды колебаний, разделенных промежутком в колебаний. В этом случае время колебаний  и
и
 ,
,
вследствие чего:  ,
,
 . (14)
. (14)
Экспериментальная установка состоит из пружинного маятника и шкалы, по которой отсчитывается амплитуда колебания груза (рис. 1). Для исключения параллакса шкала снабжена зеркалом. Глаз при отсчете положения груза следует располагать так, чтобы изображение указателя положения груза в зеркале совпадало с самим указателем.
ЗАДАНИЕ
1. Определить жесткость пружины статическим методом. Для этого следует измерить по шкале удлинение пружины при подвешивании к ней добавочного груза известной массы. Результаты измерений занести в таблицу 1. Расчет жесткости производится согласно формуле:
 .
.
2. Определить жесткость пружины динамическим методом. Для этого, сняв добавочный груз, следует оттянуть основной груз на 3-4 см вниз и, измерив время 10 полных колебаний, определить период колебаний маятника. Измерения повторить не менее трех раз и результат их усреднить. Результаты измерений занести в таблицу 2.
Воспользовавшись соотношением (7), рассчитать жесткость пружины динамическим методом и сравнить ее значение с полученным ранее статическим методом.
3. Определить логарифмический декремент затухания D и коэффициент затухания d. Для этого оттянуть груз на 6-8 см вниз от положения равновесия и, удерживая его в этом положении, измерить начальную амплитуду колебаний А0. Затем отпустить груз и одновременно включить секундомер. Измерить промежуток времени, в течение которого груз совершит 150 полных колебаний, а также амплитуду последнего колебания Аn. Рассчитать логарифмический декремент затухания D согласно формуле (14) и коэффициент затухания d согласно формуле (13).
4. Зная массу колеблющегося груза m и коэффициент затухания d, рассчитать коэффициент сопротивления r, используя формулу (9’).
5. Оценить погрешности измерений.
РЕЗУЛЬТАТЫ
Задание 1.
 Таблица 1.
Таблица 1.
| № | D m, … |  … … |  … … |  … … |  |
| 1. | |||||
| 2. | |||||
| 3. | |||||
| Ср. | хххххххх | ххххххххх |
Задание 2.
,  ,
,  …. кг Таблица 2.
…. кг Таблица 2.
| № | n | t, …. | T0, … |  … … |
| 1. | ||||
| 2. | ||||
| 3. | ||||
| Ср. |   |
Задание 3.
,  ….. кг. Таблица 3.
….. кг. Таблица 3.
| № |  … … |  … … |  … … |  | Т, … |  … … |  … … |
| 1. | |||||||
| 2. | |||||||
| 3. | |||||||
  Ср. Ср. |   |
Результаты представить в виде: 1. k ст = <k> ± Dk, e = …%;
2. k динам = <k> ± Dk, e = …%;
3. D = < D > ± D D, e = …%;
4. d = <d> ± Dd, e = …%;
5. r= <r> ± Dr, e = …%;
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. Напишите дифференциальное уравнение свободных гармонических колебаний для пружинного маятника и его решение. Чему равна частота и период колебаний пружинного маятника?
2. Что называется жесткостью пружины. В чём заключаются статический и динамический методы определения жесткости пружины k?
3. Что называют декрементом затухания и логарифмическим декрементом затухания?
4. Напишите дифференциальное уравнение свободных гармонических колебаний для физического маятника и его решение. Чему равна частота и период колебаний физического маятника?
5. Напишите дифференциальное уравнение свободных гармонических колебаний для математического маятника и его решение. Чему равна частота и период колебаний математического маятника?
6. В чём заключается методика измерения декремента затухания?
7. Напишите дифференциальное уравнение затухающих колебаний и его решение. Чему равна частота и период свободных затухающих колебаний? Чему равен коэффициент затухания?
8. Изобразите графически зависимость амплитуды свободных гармонических колебаний от времени.
9. Изобразите графически зависимость амплитуды свободных затухающих колебаний от времени.
ЛИТЕРАТУРА:
1. Трофимова Т.И. Курс физики. М.: Высш.шк., 1985, Гл.18, §§ 140-143, 146.
2. Практикум по общей физике. Под ред. проф. В.Ф.Ноздрева. М., «Просвещение», 1971, Гл.1, С.76.
ЛАБОРАТОРНАЯ РАБОТА 11-Б

