 2015-05-13
2015-05-13 4669
4669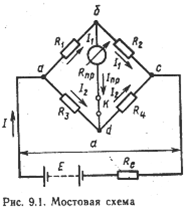 Схема, умеющая четыре плеча, к одной диагонали которой подводится питающее напряжение, а с другой диагонали снимается выходное напряжение, называется мостовой измерительной схемой или просто мостом (рис. 9.1). Она используется для преобразования изменения активного сопротивления, индуктивности или емкости датчика в изменение величины или амплитуды напряжений. Применяются два основных типа мостовой схемы: а) равновесная, или балансная, мостовая схема, предусматривающая нулевой метод измерения; б) неравновесная, или небаластная, мостовая схема предусматривающая измерение методом непосредственного отсчета по измерительному прибору, включенному в диагональ моста. Для измерения неэлектрических величин электрическими методами наиболее часто используют второй тип мостовой схемы. "В тех случаях, когда задачей мостовой схемы является не измерение, а управление каким-либо процессом, в основном применяют первый тип мостовой схемы.
Схема, умеющая четыре плеча, к одной диагонали которой подводится питающее напряжение, а с другой диагонали снимается выходное напряжение, называется мостовой измерительной схемой или просто мостом (рис. 9.1). Она используется для преобразования изменения активного сопротивления, индуктивности или емкости датчика в изменение величины или амплитуды напряжений. Применяются два основных типа мостовой схемы: а) равновесная, или балансная, мостовая схема, предусматривающая нулевой метод измерения; б) неравновесная, или небаластная, мостовая схема предусматривающая измерение методом непосредственного отсчета по измерительному прибору, включенному в диагональ моста. Для измерения неэлектрических величин электрическими методами наиболее часто используют второй тип мостовой схемы. "В тех случаях, когда задачей мостовой схемы является не измерение, а управление каким-либо процессом, в основном применяют первый тип мостовой схемы.
Мостовые схемы могут работать как на постоянном, так и на переменном токе. При равновесии мостовой схемы (сила тока в диагонали i пр = 0) и при питании ее постоянным напряжением на основании закона Кирхгофа для замкнутых контуров можно написать равенства:
 (9.1)
(9.1)
Разделив почленно одно на другое равенства (9.1) и сделав соответствующие преобразования, получим условие равновесия мостовой схемы на постоянном токе, т. е.
 . (9.2)
. (9.2)
Для равновесия мостовой схемы, питаемой переменным током, необходимо соблюдать условие
 (9.3)
(9.3)
где Z 1, Z2, Z3, Z 4 — комплексные (полные) сопротивления плеч мостовой схемы.
Комплексные сопротивления Z 1, Z2, Z3 и Z 4можно представить в виде
 } (9.4)
} (9.4)
где R 1, R 2, R 3, R 4 - активные сопротивления; х 1, х 2, x 3, x 4 — реактивные сопротивления.
Подставляя значения формулы (9.4) в формулу (9.3), получим

или
 . (9.5)
. (9.5)
Для того чтобы было соблюдено равенство (9.5), необходимо чтобы действительные (вещественные) части левой стороны были равны действительным частям правой и мнимые части левой стороны — мнимым частям правой, т. е.
 } (9.6)
} (9.6)
Трудность регулирования мостовой схемы на переменном токе заключается в том, что после выполнений условия равновесия (9.3) необходимо еще выполнить условие (9.6),не нарушая первого условия. Такое регулирование возможно только методом последовательных приближений, когда вначале добиваются минимальной силы тока, регулируя один параметр, затем добиваются еще большего уменьшения i пр, регулируя другой параметр, и т. д., последовательно уменьшая i пр до нуля.
Регулирование равновесного моста на переменном токе упрощается в следующих случаях:
1. При наличии только реактивных сопротивлений, когда активные сопротивления равны нулю (что возможно только при применении конденсаторов). В данном случае остается только одно условие равновесия
 .
.
2. Если в плечи моста включены только активные сопротивления. Тогда условие равновесия определяется только равенством
 .
.
3. Если два соседних плеча имеют только активное, а два других — только реактивное сопротивление (что возможно при применении конденсаторов). В данном случае остается только одно условие:  , если
, если  .
.
Чувствительность равновесной мостовой схемы при переменном сопротивлении R по току определяется из выражения

и по напряжению
 ,
,
где  — изменение сопротивления
— изменение сопротивления  (одного из плеч); М, N — сопротивление плеч, зависящих от способа включения датчиков; U — напряжение питания мостовой схемы; i — сила тока, потребляемая мостовой схемой от источника питания.
(одного из плеч); М, N — сопротивление плеч, зависящих от способа включения датчиков; U — напряжение питания мостовой схемы; i — сила тока, потребляемая мостовой схемой от источника питания.
Таким образом, повышение чувствительности мостовой схемы может происходить за счет увеличения напряжения питания и способов включения датчиков.

