 2015-07-14
2015-07-14 79723
79723Несмотря не огромное разнообразие технологических процессов химической промышленности, все они состоят из отдельных технологических операций, каждую из которых можно, как сказано выше, отнести к одной из следующих групп типовых процессов: механические, гидродинамические, тепловые, массообменные, химические (реакторные), термодинамические. В основе процессов каждой группы лежат общие физико-химические закономерности, что предопределяет значительное сходство их свойств как объектов автоматизаци.
Благодаря этому оказывается возможной разработка типовых схем автоматизации для объектов каждой группы. Однако, одного технологического признака недостаточно для типизации объектов автоматизации, т.к. процессы одной группы могут иметь различное аппаратурное оформление (например, сушка в барабанной сушилке или в сушилке с кипящим слоем) и, как объекты автоматизации, существенно различаться по своим свойствам. Следовательно, только сочетание двух признаков - типа технологического процесса и типа аппарата, в котором этот процесс осуществляется, полностью определяет типовой объект автоматического регулирования в химическом производстве.
|
|
|
Для каждого типового объекта можно разработать один или несколько вариантов систем автоматизации.
АСР расхода. Чаще всего возникает задача регулирования расхода газа, жидкости или пара, транспортируемого по трубопроводу. Регулирование расхода в такой системе производится путем дросселирования потока, которое зависит от степени открытия регулирующего клапана (см. рисунок 7.2):
Рисунок 7.2 – Простейшая АСР расхода
Объектом регулирования фактически является участок трубопровода между датчиком расхода и регулирующим клапаном, который можно считать безынерционным усилительным звеном. Следовательно, динамическая характеристика заданной части АСР определяется только динамическими свойствами датчика расхода и регулирующего органа. Для поддержания заданной величины расхода без остаточного отклонения в АСР расхода обычно применяются ПИ-регуляторы.
В системах регулирования расхода применяют один из трех способов изменения расхода:
- дросселирование потока вещества через регулирующий орган, устанавливаемый на трубопроводе (клапан, шибер, заслонка);
- изменение напора в трубопроводе с помощью регулируемого источника энергии (например, изменением числа оборотов двигателя насоса или угла поворота лопастей вентилятора);
- байпасирование, т е. перерос избытка вещества из основного трубопровода в обводную линию.
Регулирование расхода после центробежного насоса осуществляется регулирующим клапаном, устанавливаемым на нагнетательном трубопроводе (рисунок 7.3, а). При использовании поршневого насоса, применение подобной АСР недопустимо, так как при работе регулятора клапан может закрыться полностью, что приведет к разрыву трубопровода (или к помпажу, если клапан установлен на всасе насоса). В этом случае для регулирования расхода используют байпасирование потока (Рисунок 7.3, б).
|
|
|
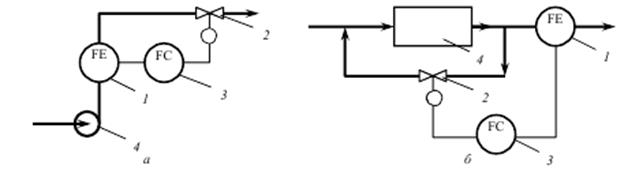
1 – измеритель расхода; 2 – регулирующий клапан; 3 – регулятор; 4 – насос.
Рисунок 7.3 - Схемы регулирования расхода после центробежного (а) и поршневого (б) насосов.
Регулирование расхода методом дросселирования потока в байпасном трубопроводе. При использовании поршневых насосов регулирующие органы нельзя устанавливать на напорном трубопроводе, т.к. изменение степени открытия такого органа приводит лишь к изменению давления в нагнетательной линии, расход же остается постоянным. Полное закрытие регулирующего органа может привести к поломке насоса. В таком случае регулирующий орган устанавливается на байпасной линии, соединяющей всасывающий и нагнетательный трубопроводы (рисунок 7.3, 6).
Недостатком данного способа регулирования является низкая экономичность. Более экономичным является метод регулирования изменением показателей работы насоса: числа оборотов вала, хода поршня, угла наклона лопастей.
Число оборотов вала можно изменить:
1. Переключением обмотки статора на различное число пар полюсов,
2. Введением реостата в цепь ротора двигателя,
3. Изменением частоты питающего тока,
4. Применяя регулируемые муфты скольжения между насосом и асинхронным двигателем.
Регулирование расхода сыпучих веществ осуществляется изменением степени открытия регулирующей заслонки на выходе из бункера (рис 7.4, а), либо изменением скорости движения ленты транспортера. Измерителем расхода при таком варианте служит взвешивающее устройство, которое определяет массу материала на ленте транспортера (рис 7.4, б).
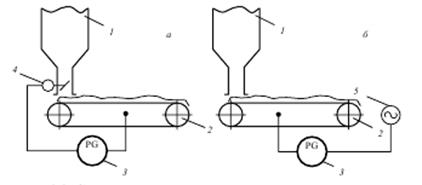
1 – бункер. 2 – транспортер; 3 – регулятор; 4 – регулирующая заслонка; 5 – электродвигатель
Рисунок 7.4. Схемы регулирования расходов сыпучих веществ:
Регулирование соотношения расходов двух веществ можно осуществлять тремя способами:
- При незаданной общей производительности расход одного вещества (рисунок 7.5, а) G1, называемый «ведущим», может меняться произвольно; второе вещество подается при постоянном соотношении γ с первым, так что «ведомый» расход равен JG1. Иногда вместо регулятора соотношения используют реле соотношения и обычный регулятор для одной переменной (рисунок 7.5, б). Выходной сигнал реле 6, устанавливающего заданный коэффициент соотношения γ, подается в виде задания регулятору 5, обеспечивающему поддержание «ведомого» расхода.
- При заданном «ведущем» расходе кроме АСР соотношения применяют и АСР «ведущего» расхода (рисунок 7.5, в). При такой схеме в случае изменения задания по расходу G1 автоматически изменится и расход G2 (в заданном соотношении с G1).
- При заданной общей нагрузке и коррекции коэффициента по третьему параметру. АСР соотношения расходов является внутренним контуром в каскадной системе регулирования третьего технологического параметра (например, температуры в аппарате). При этом заданный коэффициент соотношения устанавливается внешним регулятором в зависимости от этого параметра, так что G2 = JfyJG1 (рисунок 7.5, г). Особенность настройки каскадных АСР состоит в том, что на задание внутреннему регулятору устанавливают ограничение хрн < хр < хрв. Для АСР соотношения расходов это соответствует ограничению ун < γ < ув. Если выходной сигнал внешнего регулятора выходит за пределы [хрн,хрв], то задание регулятору соотношения остается на предельно допустимом значении γ (т. е. Ji1 или J6).
|
|
|
1, 2 - измерители расхода, 3 - регулятор соотношения, 4, 7 - регулирующие клапаны; 5 - регулятор расхода, 6 - реле соотношения, 8 - регулятор температуры, 9 - устройство ограничения.
Рисунок 7.5. Схемы регулирования соотношения расходов.
Смешение жидкостей. При разработке типового решения под объектом управления будем понимать емкость с механической мешалкой, в которой смешиваются две жидкости. Цель управления - получение жидкости (смеси) с определенной концентрацией какого-либо компонента. Расходы жидкостей А и Б и их концентрации могут изменяться при нарушении технологического режима предыдущих процессов. Расход смеси определяется последующим технологическим процессом.
Требуется при проведении процесса смешения:
1. Поддерживать материальный баланс смесителя,т.е. FА + FБ = Fсмеси.
2. Поддерживать постоянной концентрацию смеси, т.е Qсмеси = const.
Для поддержания материального баланса следует в качестве регулируемой величины выбрать уровень смеси в баке. Постоянство уровня достигается изменением расхода FБ. Постоянство концентрации Qсмеси может быть при этом обеспечено изменением расхода FА (рисунок 7.6)
Рисунок 7.6 – Пример АСР уровня
Если расход жидкости Б сильно изменяется при регулировании уровня, для улучшения качества регулирования концентрации следует использовать регулятор соотношения расходов жидкостей с коррекцией по концентрации. Этот регулятор способствует уменьшению возмущений по концентрации, поступающих при первоначальном изменении расхода жидкости. При поступлении других возмущающих воздействий, например, с изменением концентрации компонентов в жидкостях, изменится задание соотношения расходов (рисунок 7.7).
Рисунок 7.7 – Пример АСР соотношения уровней
Регулирование процесса перемешивания в трубопроводе. Если процесс перемешивания производится непосредственно в трубопроводе, то отпадает необходимость в узле стабилизации уровня, достаточно установить регулятор концентрации компонента в смеси или регулятор соотношения расходов (с коррекцией или без коррекции, рисунок 7.8).
|
|
|
Рисунок 7.8 - Регулирование процесса перемешивания в трубопроводе
АСР уровня. Уровень является косвенным показателем гидродинамического равновесия в аппарате. Постоянство уровня свидетельствует о соблюдении материального баланса, когда приток жидкости равен стоку, и скорость изменения уровня равна нулю.
В общем случае изменение уровня описывается уравнением вида:
где S - площадь горизонтального (свободного) сечения аппарата; Gex, Geыx - расходы жидкости на входе в аппарат и выходе из него; Go6 - количество жидкости, образующейся (или расходуемой) в аппарате в единицу времени. В зависимости от требуемой точности поддержания уровня применяют один из следующих двух способов регулирования:
В зависимости от требуемой точности поддержания уровня применяют один из следующих двух способов регулирования:
- позиционное регулирование, при котором уровень в аппарате поддерживается в заданных, достаточно широких пределах: Lfs < L < L^ Такие системы регулирования устанавливают на сборниках жидкости или промежуточных емкостях (рисунок 7.9). При достижении предельного значения уровня происходит автоматическое переключение потока на запасную емкость;
- непрерывное регулирование, при котором обеспечивается стабилизация уровня на заданном значении, т. е. L = L.
1 - насос; 2 - аппарат; 3 - сигнализатор уровня; 4 – регулятор уровня; 5,6 - регулирующие клапаны.
Рисунок 7.9 - Схема позиционного регулирования уровня
Особенно высокие требования предъявляются к точности регулирования уровня в теплообменных аппаратах, в которых уровень жидкости существенно влияет на тепловые процессы. Например, в паровых теплообменниках уровень конденсата определяет фактическую поверхность теплообмена. В таких АСР для регулирования уровня без статической погрешности применяют ПИ-регуляторы. П-регуляторы используют лишь в тех случаях, когда не требуется высокое качество регулирования и возмущения в системе не имеют постоянной составляющей, которая может привести к накоплению статической погрешности.
При отсутствии фазовых превращений в аппарате уровень в нем регулируют одним из трех способов:
- изменением расхода жидкости на входе в аппарат (регулирование «на притоке», рисунок 7.10, а);
- изменением расхода жидкости на выходе из аппарата (регулирование «на стоке», рисунок 7.10, б);
- регулированием соотношения расходов жидкости на входе в аппарат и выходе из него с коррекцией по уровню (каскадная АСР, Рисунок 7.10, в); отключение корректирующего контура может привести к накоплению ошибки при регулировании уровня, так как вследствие неизбежных погрешностей в настройке регулятора соотношения расходы жидкости на входе и выходе аппарата не будут точно равны друг другу, и вследствие интегрирующих свойств объекта, уровень в аппарате будет непрерывно нарастать (или убывать).
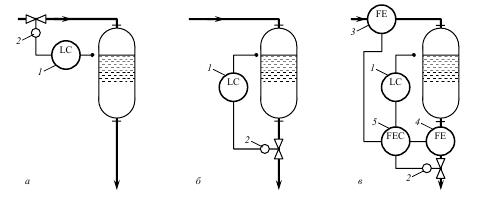
а - регулирование «на притоке»; б - регулирование «на стоке», в - каскадная АСР (1 - регулятор уровня, 2 - регулирующий клапан, 3, 4 - измерители расхода, 5 - регулятор соотношения).
Рисунок 7.10 - Схемы непрерывного регулирования уровня:
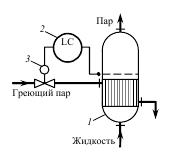
1 - испаритель; 2 - регулятор уровня, 3 - регулирующий клапан
Рисунок 7.11 - Схема регулирования уровня в испарителе
В случае, когда гидродинамические процессы в аппарате сопровождаются фазовыми превращениями, можно регулировать уровень изменением подачи теплоносителя (или хладагента). В таких аппаратах уровень взаимосвязан с другими параметрами (например, давлением), поэтому выбор способа регулирования уровня в каждом конкретном случае должен выполняться с учетом остальных контуров регулирования. Особое место в системах регулирования уровня занимают АСР уровня в аппаратах с кипящим (псевдосжиженным) слоем зернистого материала (рисунок 7.12).
Устойчивое поддержание уровня кипящего слоя возможно в достаточно узких пределах соотношения расхода газа и массы слоя. При значительных колебаниях расхода газа (или расхода зернистого материала) наступает режим уноса слоя или его оседания. Поэтому к точности регулирования уровня кипящего слоя предъявляют особо высокие требования. В качестве регулирующих воздействий используют расход зернистого материала на входе или выходе аппарата (рисунок 7.12, а) или расход газа на ожижение слоя (рисунок 7.12, б).
а - отводом зернистого материала, 6 - изменением расхода газа (1 - аппарат с кипящим слоем, 2 - регулятор уровня, 3 - регулирующий орган).
Рисунок 7.12 - Регулирование уровня кипящего слоя:
АСР давления. Давление является показателем соотношения расходов газовой фазы на входе в аппарат и выходе из него. Постоянство давления свидетельствует о соблюдении материального баланса по газовой фазе. Обычно давление (или разрежение) в технологической установке стабилизируют в каком-либо одном аппарате, а по всей системе оно устанавливается в соответствии с гидравлическим сопротивлением линии и аппаратов. Например, в многокорпусной выпарной установке (см. рисунок 7.13, а) стабилизируют разрежение в последнем выпарном аппарате. В остальных аппаратах при отсутствии возмущений устанавливается разрежение, которое определяется из условий материального и теплового балансов с учетом гидравлического сопротивления технологической линии.
В тех случаях, когда давление существенно влияет на кинетику процесса (например, в процессе ректификации), предусматривается система стабилизации давления в отдельных аппаратах (рисунок 7.13, б). Кроме того, при регулировании процесса бинарной ректификации часто в качестве косвенного показателя состава смеси используют ее температуру кипения, которая однозначно связана с составом лишь при постоянном давлении. Поэтому в продуктовых ректификационных колоннах обычно предусматривают специальные системы стабилизации давления.
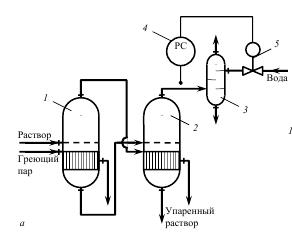
1,2 - выпарные аппараты; 3 - барометрический конденсатор; 4 – регулятор разрежения;
5 – регулирующий клапан.
Рисунок 7.13а - Регулирование разряжения в многокорпусной выпарной установке
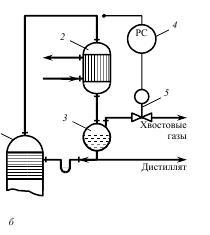
1 – колонна; 2 – дефлегматор; 3 – флегмовая ёмкость; 4 – регулятор давления;
5 – регулирующий клапан
Рисунок 7.13Б - АСР давления в ректификационной колонне
Регулирование разряжения в многокорпусной выпарной установке. В данной системе регулирующим воздействием является расход охлаждающей воды в барометрический конденсатор, который влияет на скорость конденсации вторичного пара.
Регулирования перепада давления. В таких аппаратах регулируется перепад давления, характеризующий гидродинамический режим, который влияет на протекание процесса (рисунок 7.14).
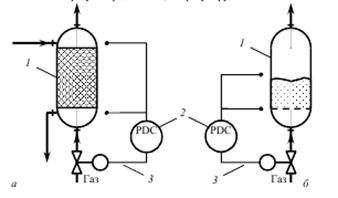
а - в колонном аппарате с насадкой; б - в аппарате с кипящем слоем (1 - аппарат; 2 - регулятор перепада давления; 3 - регулирующий клапан).
Рисунок 7.14 - Схема регулирования перепада давления
В целом АСР давления жидкости, газа или пара, транспортируемого по трубопроводу имеет много общего с АСР расхода, т.к. объекты регулирования обладают одинаковыми свойствами. Иногда для регулирования давления в трубопроводах пара или сжатого воздуха применяют П-регуляторы прямого действия.
При отсутствии резких и значительных по амплитуде возмущений они обеспечивают хорошее качество регулирования благодаря минимальной инерционности контура регулирования.
АСР Регулирование температуры. Температура является показателем термодинамического состояния системы и используется как выходная координата при регулировании тепловых процессов. Динамические характеристики объектов в системах регулирования температуры зависят от физико-химических параметров процесса и конструкции аппарата. Поэтому общие рекомендации по выбору АСР температуры сформулировать невозможно, и требуется анализ каждого конкретного процесса.
К общим особенностям АСР температуры можно отнести значительную инерционность тепловых процессов и промышленных датчиков температуры. Поэтому одна из основных задач при проектировании АСР температуры - уменьшение инерционности датчиков.
Рассмотрим, например, динамические характеристики термометра в защитном чехле (рисунок 7.15).
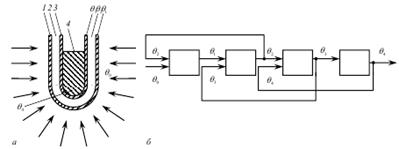
1 - защитный чехол; 2 - воздушная прослойка; 3 - стенка термометра; 4 - рабочая жидкость.
Рисунок 7.15. Принципиальная (а) и структурная (б) схемы термометра
Структурную схему термометра можно представить как последовательное соединение четырех тепловых емкостей (рисунок 7.15, б): защитного чехла 1, воздушной прослойки 2, стенки термометра 3 и собственно рабочей жидкости 4. Если пренебречь тепловым сопротивлением каждого слоя, то все элементы можно аппроксимировать апериодическими звеньями 1-го порядка, уравнения которых имеют вид:

или

где

Mj – масса соответственно чехла, воздушной прослойки, стенки и жидкости; cpj – удельные теплоемкости; αj1, αj2 – коэффициенты теплоотдачи; Fj1, Fj2 – поверхности теплоотдачи.
Как видно из последнего уравнений, основными направлениями уменьшения инерционности датчиков температуры являются:
- повышение коэффициентов теплоотдачи от среды к чехлу в результате правильного выбора места установки датчика; при этом скорость движения среды должна быть максимальной; при прочих равных условиях более предпочтительна установка термометров в жидкой фазе (по сравнению с газообразной), в конденсирующемся паре (по сравнению с конденсатом) и т. п.;
- уменьшение теплового сопротивления и тепловой емкости защитного чехла в результате выбора его материала и толщины;
- уменьшение постоянной времени воздушной прослойки за счет применения наполнителей (жидкость, металлическая стружка); у термоэлектрических преобразователей (термопар) рабочий спай припаивается к защитному чехлу;
- выбор типа первичного преобразователя; например, при выборе термометра сопротивления, термопары или манометрического термометра необходимо учитывать, что наименьшей инерционностью обладает термопара в малоинерционном исполнении, наибольшей – манометрический термометр.
АСР числа рН. Системы регулирования рН можно подразделить на два типа, в зависимости от требуемой точности регулирования. Если скорость изменения рН невелика, а допустимые пределы ее колебаний достаточно широки, применяют позиционные системы регулирования, поддерживающие рН в заданных пределах: рНн ≤ рН ≤ рНв. Ко второму типу относятся системы, обеспечивающие регулирование процессов, в которых требуется точное поддержание pH на заданном значении (например, в процессах нейтрализации). Для их регулирования используют непрерывные ПИ- или ПИД-регуляторы.
Общей особенностью объектов при регулировании рН является нелинейность их статических характеристик, связанная с нелинейной зависимостью рН от расходов реагентов. на рисунке 7.16 показана кривая титрования, характеризующая зависимость рН от расхода кислоты G1. Для различных заданных значений рН на этой кривой можно выделить три характерных участка: первый (средний), относящийся к почти нейтральным средам, близок к линейному и характеризуется очень большим коэффициентом усиления; второй и третий участки, относящиеся к сильно щелочным или кислым средам, обладают наибольшей кривизной.
На первом участке объект по своей статической характеристике приближается к релейному элементу. Практически это означает, что при расчете линейной АСР коэффициент усиления регулятора настолько мал, что выходит за пределы рабочих настроек промышленных регуляторов. Так как собственно реакция нейтрализации проходит практически мгновенно, динамические характеристики аппаратов определяются процессом смешения и в аппаратах с перемешивающими устройствами достаточно точно описываются дифференциальными уравнениями 1-го порядка с запаздыванием. При этом, чем меньше постоянная времени аппарата, тем сложнее обеспечить устойчивое регулирование процесса, так как начинают сказываться инерционность приборов и регулятора и запаздывание в импульсных линиях.
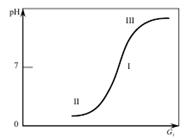
Рисунок 7.16 - Зависимость величины рН от расхода реагента
Для обеспечения устойчивого регулирования рН применяют специальные системы. на рисунке 7.17, а показан пример системы регулирования рН с двумя регулирующими клапанами.
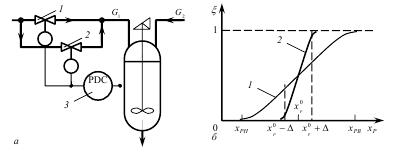
а – функциональная схема; б – статические характеристики клапанов (1, 2 – регулирующий клапан3 – регулятор рН).
Рисунок 7.17 - Пример системы регулирования рН
Клапан 1, обладающий большим условным диаметром, служит для грубого регулирования расхода и настроен на максимальный диапазон изменения выходного сигнала регулятора [хрн,хрв] (Рисунок 7.17, б, кривая 1). Клапан 2, служащий для точного регулирования, рассчитан на меньшую пропускную способность и настроен таким образом, что при хр = х0р + Δ он полностью открыт, а при хр = х0р - Δ - полностью закрыт (кривая 2). Таким образом, при незначительном отклонении рН от рН0, когда х0р - Δ < хр < х0р + Δ, степень открытия клапана 1 практически не изменяется, и регулирование ведется клапаном 2. Если |хр - х0р|, клапан 2 остается в крайнем положении, и регулирование осуществляется клапаном 1.
На втором и третьем участках статической характеристики (Рисунок 3.12, б) ее линейная аппроксимация справедлива лишь в очень узком диапазоне изменения рН, и в реальных условиях ошибка регулирования за счет линеаризации может оказаться недопустимо большой. В этом случае более точные результаты дает кусочно-линейная аппроксимация (рисунок 7.18), при которой линеаризованный объект имеет переменный коэффициент усиления.
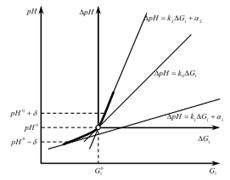
Рисунок 7.18 - Кусочно-линейная аппроксимация статической характеристики объекта при регулировании рН
На рисунке 7.19 приведена структурная схема такой АСР. В зависимости от рассогласования рН, включается в работу один из регуляторов, настроенный на соответствующий коэффициент усиления объекта.
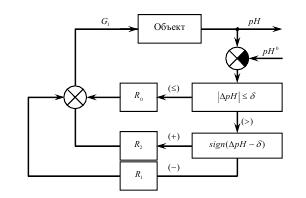
Рисунок 7.19 - Структурная схема системы регулирования рН с двумя регуляторами.
АСР параметров состава и качества. В процессах химической технологии большую роль играет точное поддержание качественных параметров продуктов (концентрация определенного вещества в потоке и т.п.). Эти параметры сложно измерить. В некоторых случаях для измерения состава используют хроматографы, которые выдают результаты измерения в дискретные моменты времени (по продолжительности цикла работы хроматографа).
Дискретность измерения может привести к значительным дополнительным запаздываниям и снижению динамической точности регулирования. Чтобы уменьшить нежелательное влияние задержки измерения, используют модель связи качества продукта с переменными, которые измеряют непрерывно. Эта модель может быть достаточно простой; коэффициенты модели уточняют, сравнивая рассчитанное по ней и найденное в результате очередного анализа значение качественного параметра.
Таким образом, одним из рациональных способов регулирования качества является регулирование по косвенному вычисляемому показателю с уточнением алгоритма его расчета поданным прямых анализов. В промежутках между измерениями показатель качества продукта может быть рассчитан экстраполяцией ранее измеренных значений. Блок-схема системы регулирования параметра качества продукта показана на рисунке 7.20. Вычислительное устройство в общем случае непрерывно рассчитывает оценку показателя качества ~ (t) по формуле:

в которой первое слагаемое отражает зависимость от непрерывно измеряемых переменных процесса или величин, динамически с ними связанных, например производных, а второе - от выхода экстраполирующего фильтра.
Для повышения точности регулирования состава и качества применяют приборы с устройством автоматической калибровки. В этом случае система управления производит периодическую калибровку анализаторов состава, корректируя их характеристики.
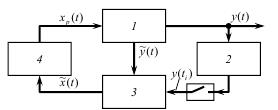
1 – объект; 2 –анализатор качества; 3 – вычислительное устройство; 4 – регулятор
Рисунок 7.20 -. Блок-схема АСР параметра качества продукта:
В качестве примера рассмотрим процесс принятия решений при автоматизации одного из распространенных типовых процессов.
Автоматизация процесса перемешивания. Общая характеристика процессов перемешивания в жидких средах. Перемешивание - гидромеханический процесс взаимного перемещения частиц в жидкой среде с целью их равномерного распределения во всем объеме под действием импульса, передаваемого среде мешалкой, струей жидкости или газа.








