 2015-04-01
2015-04-01 1226
1226Объекты, в которых протекают рабочие процессы, если они самостоятельно не обеспечивают нормального хода процесса, требуют управления ими. Управление — целенаправленная организация соответствующего процесса. Управляемые объекты (УО) –устройства, технологические машины, транспортные средства, производственные участки, депо, заводы, энергетические системы, осуществляющее технический процесс, нуждающийся в организованных воздействиях извне для точного выполнения его алгоритма функционирования. Алгоритмом функционирования называют совокупность предписаний, ведущих к правильному выполнению указанного технического процесса. Управляемый объект содержит управляющий орган, через который производится управление процессом. Это управление характеризуется соответствующим алгоритмом. Алгоритмом управления называется совокупность предписаний, определяющая характер воздействий на управляющий орган с целью выполнения заданного алгоритма функционирования. Если воздействие на управляющий орган осуществляет человек, то такое управление называется ручным.
В процессе управления человек получает информацию о задаче управления xз и результате управления хк. Затем он производит анализ полученной информации (например, сравнение xз и хк) и осуществляет управляющее воздействие ху, если их значения не совпадают. Следовательно, для перехода к автоматическому управлению, предполагающему замену человека, необходимо, кроме источника информации о задачах управления и источника информации о результатах управления, предусмотреть устройства анализа получаемой информации, устройства преобразования и исполнительные устройства, воздействующие на управляющий орган.
Автоматическим управляющим устройством называется устройство, осуществляющее воздействие на УО, соответствующее алгоритму управления. Совокупность УО и АУУ и представляет собой автоматическую систему. В этой системе имеются входы — части системы, на которые подается внешнее воздействие; выходы — части системы, которые в соответствии с алгоритмом функционирования воздействуют на внутренние. Кроме того, следует различать: внешнее воздействие — воздействие внешней среды на автоматическую систему; внутреннее воздействие — воздействие одной части автоматической системы на другую; цепь воздействий — путь передачи воздействий; входное воздействие — воздействие, подаваемое на вход, выходное воздействие — воздействие, выдаваемое на выходе (xвых), управляющее воздействие — воздействие управляющего устройства на управляемый объект (Ху); контрольное воздействие — воздействие управляемого объекта на управляющее устройство (xк); управляемую величину — величину, характеризующую планируемую составляющую выходного воздействия; предписанное значение — значение управляемой величины, предписанное алгоритмом функционирования; действительное значение — значение управляемой величины, соответствующее фактическому состоянию управляемого объекта;
задающую величину — величину, характеризующую планируемое входное воздействие на входе; несущую величину — физическую величину, посредством которой передается воздействие (напряжение, давление газа, температура воздуха и т. п.); представляющий параметр — количественный показатель несущей величины (амплитуда, частота, фаза); сигнал — обусловленное (заранее договоренное) состояние или изменение состояния представляющего параметра, отображающее информацию, которая содержится в воздействии (хвх(t),
хвых(t) и т.п.).
Входные воздействия зачастую целесообразно представлять в виде полезных сигналов и помех. Первые, если возможно, стараются описать какой-либо детерминированной функцией, наиболее близко отражающей реальное входное воздействие. При этом также преследуется цель сравнения реакций систем на однотипные возмущения.
Системы управления, в которых решения об управляющих воздействия принимает человек, а автоматические устройства используются для сбора, обработки и предоставления информации о задачах и результатов управления, называются автоматизированной системой управления.
В автоматизированном производстве оператор выполняет наладку, ремонт оборудования, контролирует его работу и выполнение технологического процесса.
АВТОМАТИЧЕСКОЙ СИСТЕМЫ
Автоматические системы характеризуются наличием большого многообразия элементов. Однако, несмотря на различие, элементы в системе можно объединять в зависимости от выполняемых ими функций. Часть автоматической системы, выполняющая определенную функцию, называется функциональным блоком. Функциональной схемой (блок-схемой) называется совокупность функциональных блоков с соответствующими связями между ними. В функциональной схеме может быть разнообразный набор функциональных блоков. В общем случае используются следующие виды функциональных блоков:
воспринимающий блок — функциональный блок автоматического управляющего устройства, принимающий контрольные или внешние воздействия;
задающий блок — функциональный блок автоматического управляющего устройства, фиксирующий предписания, соответствующие заданному алгоритму
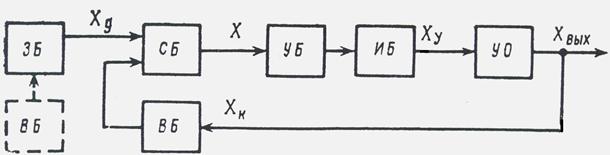
Функциональная схема автоматической системы
управления, предназначенный для установления необходимого значения управляемой величины;
управляющий блок — функциональный блок автоматического управляющего устройства, вырабатывающий воздействие на исполнительный блок в соответствии с алгоритмом управления;
исполнительный блок — функциональный блок автоматического управляющего устройства, осуществляющий выработку управляющих воздействий;
сравнивающий блок — функциональный блок, реализующий сопоставление значений управляемой и заданной величин, т. е. вырабатывающий отклонение управляемой величины от ее заданного значения.
Функциональная схема служит для представления принципа действия автоматической системы. По ней можно относительно просто составить принципиальную схему системы.
КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Классификация автоматических систем по характеру алгоритма управления. Автоматическая система с разомкнутой цепью воздействий. В этих системах заложен принцип управления по внешнему воздействию. Так как определяющими внешними воздействиями считаются задающие хg и возмущающие xf, то обычно выделяются здесь 2 вида систем: системы с управлением по задающему воздействию и системы с управлением по возмущающему воздействию. В обоих случаях автоматическая система не реагирует на результат своего действия (т. е. хвых), поэтому контрольное воздействие хк, поступающее по цепи обратной связи, отсутствует.
Система с управлением по возмущению основана на принципе компенсации возмущений в УО за счет соответствующей выработки управляющих воздействий ху. Управляющее воздействие в свою очередь вырабатывается в зависимости от результатов измерения возмущения хf:
ху = ху (хf).
Данная система отрабатывает управляющее воздействие лишь на определенное возмущение, когда появление его новых форм не предусматривается.
Система с управлением по задающему воздействию используется в случае независимости состояния объекта от внешних случайных факторов (х() при необходимости изменения этого состояния по предписанным алгоритмам. Поэтому алгоритм управления строится здесь на основе алгоритма функционирования, т. е. управляющее воздействие является функцией задающего:
ху = ху (хg).
Отличительная особенность автоматической системы с разомкнутой цепью воздействий состоит в том, что входными воздействиями управляющего устройства являются только внешние воздействия.
Автоматическая система с замкнутой цепью воздействий. В этих системах заложен принцип управления по отклонению (рассогласованию). Поэтому в них имеется блок, вырабатывающий отклонение управляемой величины хвых от предписанной xg:
х = хg –хвых ,
что представляет собой ошибку управления. Данная система предусматривает сравнение действительного значения управляемой величины хъых с предписанным xg, и ее управляющее воздействие является функцией отклонения х:
ху = ху (х)
Отличительная особенность автоматической системы с замкнутой цепью воздействий состоит в том, что входными воздействиями для управляющего устройства являются как внешние, так и контрольные воздействия. Такая автоматическая система реагирует на результат своего действия через замкнутый контур.
Автоматическая система с комбинированной цепью воздействий. Этот тип систем основан на комбинации предыдущих. Здесь возможна реализация системы с управлением по возмущению и отклонению, с управлением по задающему
Классификация автоматических систем по характеру алгоритма функционирования. Стабилизирующая автоматическая система. Алгоритм функционирования данной системы содержит предписание поддерживать управляемую величину на постоянном уровне хвых = const. Следовательно, для этой системы xg=const. Программная автоматическая система. Алгоритм функционирования данной системы содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией. Программы подразделяются на временные хg=хg(t) и параметрические (координатные) xg =xg (s1,s2,..., sn) (где Si — физические величины, характеризующие состояние управляемого объекта).
Следящая автоматическая система. Алгоритм функционирования данной системы содержит предписание изменять управляемую величину в зависимости от значения неизвестной заранее переменной величины на входе автоматической системы. Выходная величина должна быть поставлена в соответствии с входной, т. е. «следить» за последней.
Классификация автоматических систем по самоприспосабливанию. Различают системы без самоприспосабливания и самоприспосабливающиеся системы. Самоприспосабливающаяся система имеет дополнительное автоматическое устройство, изменяющее алгоритм управления основного автоматического управляющего устройства таким образом, чтобы автоматическая система в целом осуществляла заданный алгоритм функционирования. Самонастраивающиеся системы подразделяются на системы с разомкнутой цепью самонастройки, с моделью, с анализом процесса управления, экстремальные и т. п.
Классификация автоматических систем по типу оператора системы. Автоматические системы, имеющие один выход, называются одномерными, несколько выходов — многомерными. Формально векторное или матричное представление переменных дает возможность многомерную систему представить одномерной. Каждой комбинации входных функций детерминированная автоматическая система ставит в соответствие некоторую единственную комбинацию выходных. Закон, определяющий выходные функции по заданным входным, называется оператором.
По типу оператора автоматические системы делятся на линейные и нелинейные.
Линейная система характеризуется линейностью оператора. Оператор системы линеен, если выполняется принцип суперпозиции, т. е. результат действия оператора А на комбинацию заданных функций хi является линейной комбинацией результата действия оператора А на каждую функцию:
Линейная система описывается линейными дифференциальными уравнениями.
Нелинейная система имеет нелинейный оператор А, для которого принцип суперпозиции не выполняется вообще или выполняется частично. Эта система описывается нелинейными дифференциальными уравнениями, решение которых в аналитической форме возможно лишь для частных видов невысокого порядка.
По типу оператора автоматические системы делятся также на стационарные и нестационарные.
Стационарная система характеризуется стационарным оператором А, т. е. оператором, свойства которого не зависят от времени. Реакция системы на любой тип возмущения зависит только от интервала t — t0 (где t0 — момент приложения сигнала на входе). Стационарная система описывается дифференциальными уравнениями с постоянными коэффициентами.
Нестационарная система имеет нестационарный оператор, свойства и структура которого во времени изменяются. В этом случае, если хвх сдвинуть во времени при сохранении его формы, т. е. сигнал на вход приложить в момент  ,то выходные переменные не только сдвигаются во времени на величину
,то выходные переменные не только сдвигаются во времени на величину  , но и изменяют форму. Нестационарная система описывается дифференциальными уравнениями с переменными во времени коэффициентами.
, но и изменяют форму. Нестационарная система описывается дифференциальными уравнениями с переменными во времени коэффициентами.
Классификация автоматических систем по характеру их действия. По характеру действия системы делятся на системы прямого и непрямого действия.
Системой прямого или непосредственного действия называется автоматическая система, у которой управляющее воздействие ху вырабатывается непосредственно от сигнала на выходе xвых, а последний при этом достаточно высок. Для получения ху не требуется источник дополнительной энергии.
Автоматическая система непрямого действия вырабатывает управляющее воздействие ху от малого по уровню сигнала рассогласования х, поэтому она требует промежуточного усиления, реализуемого за счет использования дополнительной энергии.
Кроме того, по характеру действия системы делятся на системы непрерывного и дискретного действия.
Автоматические системы непрерывного действия характеризуются непрерывностью проходимого по цепи воздействий сигнала, который может быть описан непрерывной функцией времени.
Автоматические системы дискретного действия отличаются дискретным характером внутренних воздействий. Дискретные системы подразделяются на релейные, импульсные и цифровые. В первых производится квантование сигнала по уровню, во вторых — по времени (амплитудно-импульсная, широтно-импульсная, фазоимпульсная, частотно-импульсная модуляция), в третьих — по времени и по уровню (импульсно-кодовая модуляция).
Дискретные автоматические системы в ряде случаев более просты, нечувствительны к помехам, они неизбежны при использовании в автоматических управляющих устройствах цифровых вычислителей.
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ
АВТОМАТИЧЕСКИХ СИСТЕМ И ЗАКОНЫ УПРАВЛЕНИЯ
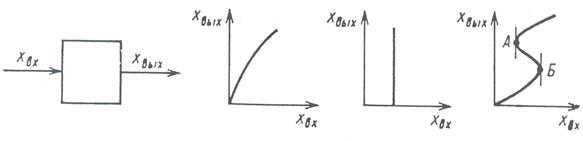
Статической характеристикой называется зависимость (аналитическая, графическая) выходного воздействия от входного в установившемся режиме:
Различают два режима работы системы: установившийся и переходный. Установившийся режим характеризуется отсутствием собственных движений в системе. Его отличает равенство взаимодействующих в системе сил, притока и расхода энергии, вещества. В промежутках между установившимися режимами имеет место переходный режим, характеризуемый наличием собственных движений в системе.
 Статические характеристики элементов
Статические характеристики элементов
Элементы автоматической системы принято делить на статические и астатические. Статическим называется элемент, выходное воздействие которого при ступенчатом изменении входного сигнала (переходная функция) стремится к новому установившемуся значению. Астатическим называют элемент, если при указанном входе выходная величина возрастает при постоянной скорости (астатизм первого порядка).
Статическая характеристика элемента может быть найдена аналитически на основании использования физического закона, описывающего реальный процесс, протекающий в элементе. Ее можно построить экспериментально, снимая на выходе значение выходных координат, соответствующих подаваемым входным. В этом случае удобнее графическое представление статической характеристики, статического элемента и астатического элемента. На рисунке представлена сложная статическая характеристика, имеющая точки (А, Б) астатизма. Если элемент имеет два входа, то его статическая характеристика будет представлена семейством кривых.
Статическая характеристика автоматической системы аналитически имеет вид

Она может быть получена на основании найденных статических характеристик блоков.
ТИПОВЫЕ УПРАВЛЯЕМЫЕ ОБЪЕКТЫ
Характерной особенностью любого управляемого объекта является наличие у него управляющего органа, через который производится воздействие автоматического управляющего устройства на объект. При этом изменяется выходное воздействие. Это выходное воздействие характеризует энергетический уровень объекта и зависит в свою очередь от возмущения (нагрузки). Следовательно, управляемый объект имеет, по крайней мере, два входа. На один (управляющий орган) подается управляющее воздействие, на второй поступает возмущающее воздействие.
Нагрузка — определяющая часть возмущения, для автоматической системы является воздействием внешним. Она связана с преобразованием энергии в объекте или протекающим через него веществом. Изменение энергетического уровня или количества вещества может быть вызвано расходом со стороны потребителя, переходом к следующему объекту, рассеиванием в окружающую среду. Довольно часто нагрузка меняется ступенчато; в более общем случае может быть охарактеризована случайным процессом.
Исследование автоматической системы предполагает определенное описание не только элементов, но и управляемого объекта. Из разнообразных методов описания (при помощи принципиальных и функциональных схем, экспериментальных графиков и таблиц, дифференциальных и разностных уравнений) самым распространенным является метод описания объекта при помощи дифференциальных уравнений. Он позволяет проводить исследование в обобщенном виде как в статике, так и в динамике (установившихся и переходных режимов).
Для составления уравнений поведения (состояния) объекта предварительно устанавливают физический закон, определяющий рабочий процесс: закон сохранения вещества (управление уровнем, давлением); закон сохранения энергии (управления температурой); уравнения (законы) динамики (управление скоростью, перемещением); законы Кирхгофа (управление в электрических цепях) и т. п.
Математическое выражение рассматриваемого физического закона, соответствующим образом представленное в виде дифференциального уравнения, в достаточной мере будет характеризовать управляемый объект.
В качестве примера рассмотрим тепловой управляемый объект.
Тепловые объекты широко распространены в вагоностроении и вагонном хозяйстве (печи-подогреватели, сушилки, грузовые и пассажирские помещения вагонов и т. п.).
Для однопараметрового теплового объекта с сосредоточенной емкостью уравнение состояния имеет вид

где с — удельная теплоемкость вещества [кДж/(кг • град)]; m — масса вещества, кг; Т° — температура вещества, град;
 — разность количеств тепла на входе и выходе объекта (
— разность количеств тепла на входе и выходе объекта ( ), кВт.
), кВт.
Рассмотрим объект с электронагревом (грузовое помещение рефрижераторного вагона, пассажирское помещение, цехи и участки,
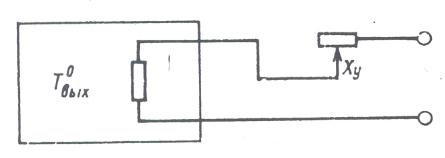
Схема теплового управляемого объекта
ванны и т. п.), показанный на рисунке. Количество подводимого к веществу тепла определяется нелинейной зависимостью от температуры Т° и управляющего воздействия ху. Линеаризация этой зависимости позволит записать
Первая производная может быть определена на основе уравнения теплопередачи от нагревателя к веществу
где  — коэффициент теплоотдачи от нагревателя к веществу (кВт/м2-град);
— коэффициент теплоотдачи от нагревателя к веществу (кВт/м2-град);
SH — теплопередающая поверхность, м2;
 —температура нагревателя (град), т. е.
—температура нагревателя (град), т. е.

Вторая производная определяется из статической характеристики управляющего органа объекта:

Количество отбираемого тепла, если пренебречь естественным рассеянием в окружающую среду, является неизвестной функцией времени, нагрузкой (через открывающиеся двери и т. п.)  Используя это и в уравнении, после преобразований получим
Используя это и в уравнении, после преобразований получим

где 
Если производится охлаждение среды (воздуха) при помощи холодильной установки, то результирующее дифференциальное уравнение сохранит тот же вид. При этом вместо нагревателя рассматривается испаритель.
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
Динамической характеристикой называется взаимозависимость выходного воздействия от входного в переходном режиме:

Для линейных систем оператор А определяется разнообразными формами явного или неявного описания динамических характеристик, таких как линейные дифференциальные уравнения, передаточные и частотные передаточные функции, переходные и импульсные переходные функции.
Передаточная функция. Понятие передаточной функции основано на преобразованиях Лапласа, преобразующих функцию f (t) вещественного переменного t в функцию F (s) комплексного переменного  в комплексной области. Изображение F (s) и оригинал f(t) связаны прямым и обратным интегральными преобразованиями:
в комплексной области. Изображение F (s) и оригинал f(t) связаны прямым и обратным интегральными преобразованиями:
 ;
;

Переход к лапласовым изображениям облегчает исследование сложных систем за счет замены дифференциальных уравнений алгебраическими, упрощает учет начальных условий и получение постоянных интегрирования, а также учет возмущений. Переход от дифференциальных уравнений к алгебраическим осуществляется на основе преобразования производных функций:
 ;
;
 ;
;
 ;
;
Передаточной функцией называется отношение изображений по Лапласу выходного и входного воздействий с нулевыми начальными данными. Она является по типу уравнения коэффициентом в линейном соотношении

Если рассмотреть дифференциальное уравнение

затем перейти к изображениям по Лапласу согласно уравнению с учетом нулевых начальных условий

и разделить на собственный оператор системы, то получим с учетом дифференциальное уравнение системы в виде

где Wg, Wf— передаточные функции по задающему и возмущающему входам, представляющие собой дробно-рациональные функции:
**<»)=■
В реальных системах m< n и r< п. При s = 0 передаточная функция вырождается в коэффициент передачи по соответствующему входу (kg, kf).
Частотная передаточная функция. Понятие частотной передаточной функции строится на преобразованиях Фурье:


Вследствие физического смысла частоты, из которого вытекает ω > 0, преобразование Фурье может быть получено из преобразований Лапласа отбрасыванием в s действительной части α или заменой s на iω:
 ;
;
Частотной передаточной функцией называется отношение изображений по Фурье выходного и входного воздействий с нулевыми начальными условиями:
Частотную передаточную функцию удобно получать из передаточной заменой s на iω:
 ;
;
Используя это можем записать:
 где A(ω) — амплитудная частотная функция:
где A(ω) — амплитудная частотная функция:
φ(ω) — фазовая частотная функция:
 ;
;

Это определено тем, что при подаче на вход гармонического сигнала с амплитудой А вх и частотой ω на выходе появится сигнал с новой амплитудой А вых и сдвигом фазы φ той же частоты ω. Амплитудная  и фазовая φ(ω) частотные функции являются характеристиками автоматической системы.
и фазовая φ(ω) частотные функции являются характеристиками автоматической системы.
Для анализа автоматической системы строят следующие частотные характеристики:
годограф частотной передаточной функции (амплитудно-фазовая частотная характеристика), представляющий собой геометрическое место точек концов вектора W (iω) при изменении ω от 0 до ∞ (длина вектора — амплитудная характеристика, угол с положительным направлением действительной оси, отсчитываемый против часовой стрелки — фазовая характеристика).
 |
амплитудную частотную характеристику, представляющую собой зависимость амплитуды mod W (iω) от частоты ω при изменении частоты от 0 до ∞;
фазовую частотную характеристику, представляющую собой зависимость фазы arg W (iω) от частоты ω при изменении частоты от 0 до ∞.
Переходная и импульсная переходная функции. Переходная функция h (t) представляет собой функциональную зависимость от времени выходного воздействия при подаче на вход воздействия типа единичной ступенчатой функции с нулевыми начальными условиями:
Q(p)h(t) = R(p)l(t).
В том случае, если на вход подается ступенчатое возмущение хвх = Вh (t), на выходе получим хвых = Bh (t) для линейной системы. Используя преобразование Лапласа и введенное понятие передаточной функции W (s), по аналогии запишем
H(s) = W(s)  .
.
Импульсной переходной функцией g(t) называется реакция системы на единичную импульсную функцию δ(t) при нулевых начальных условиях:
Q(p)g(t)=R(p)δ(t).
Так как входное воздействие в (5.16) получается из входного воздействия дифференцированием последнего, то и импульсную переходную функцию g (t) для линейной системы можно получить из переходной h (t) дифференцированием:

Здесь по аналогии получим
G(s) = W(s),
Что даёт основание передаточную функцию определять как преобразование Лапласа реакции системы на единичную импульсную функцию с нулевыми начальными условиями.
Типовые динамические звенья
Независимо от конкретного исполнения и функционального назначения элементы САУ при исследовании ее динамики представляются в виде динамических звеньев.
Под динамическим звеном понимается математическая модель элемента, объекта или части системы. Если звено представляется дифференциальным уравнением не выше второго порядка, оно называется элементарным:
T12  хвых + Т2
хвых + Т2  хвых + хвых =k хвх+ ….
хвых + хвых =k хвх+ ….
Из этого уравнения можно получить ряд более простых уравнений, которые характеризуют типовые элементарные динамические звенья: безынерционное, инерционные 1-го и 2-го порядка, колебательное, интегрирующее, дифференцирующее.
Сложное динамическое звено представляет собой совокупность элементарных звеньев. Автоматическая система, включающая в себя бесчисленное множество элементов и объектов, может быть представлена конечным небольшим числом динамических звеньев.
Безынерционное звено
Безынерционным (усилительным) называется звено, характеризуемое и в статике, и в динамике алгебраическим уравнением:
 .
.
Передаточная функция звена
 .
.
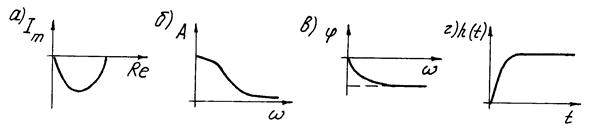
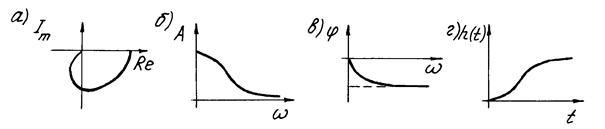
Частотная передаточная функция  , амплитудная частотная характеристика
, амплитудная частотная характеристика  , фазовая частотная характеристика
, фазовая частотная характеристика  , переходная функция звена
, переходная функция звена  (рис. 1.1, г).
(рис. 1.1, г).

Частотные характеристики и переходная функция безынерционного звена
Инерционное звено первого порядка
 .
.
Передаточная функция и частотная передаточная функция
 ;
;  .
.
Амплитудная и фазовая частотные характеристики
 ;
;
 .
.
Переходная функция
 .
.
Частотные характеристики и переходная функция инерционного
звена первого порядка
Инерционное звено второго порядка

при условии: T22 – 4T12 > 0.
Передаточная функция и частотная передаточная функция (рис. 1.3, а)

 ;
;  .
.
Частотные характеристики и переходная функция инерционного звена
второго порядка
Амплитудная и фазовая частотные характеристики
 ;
;
 .
.
Переходная функция, согласно корням характеристического уравнения
T12p2 + T2p + 1 = 0
 ,:
,:
 .
.

при условии: T22 – 4T12 < 0.
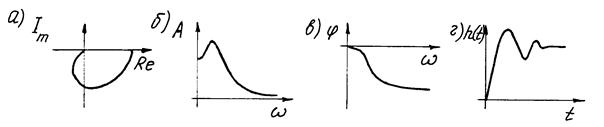
Частотные характеристики и переходная функция колебательного звена
 .
.
Передаточная функция и частотная передаточная функция
 ;
;  .
.
Амплитудная и фазовая частотные характеристики
 ;
;  .
.
Переходная функция
h(t) =  .
.

Частотные характеристики и переходная функция интегрирующего звена
 .
.
Характеристики звена:
 ;
;  ;
;
 ;
;  ;
;  .
.

Частотные характеристики и переходная функция дифференцирующего звена
Исследование динамических характеристик типовых звеньев САР можно провести аналитически с учетом фактических значений параметров K и Ti или с использованием специальных программ (см. комплекс “Avtomat”).
Для исследования динамических характеристик элементов и объектов САУ необходимо получить численные значения параметров динамических звеньев – коэффициента передачи К (статический параметр) и постоянной времени Т (динамический параметр). Коэффициент передачи можно получить из графика статической характеристики элемента, найденной либо аналитически на основании использования физического закона, описывающего реальный процесс, протекающий в элементе, либо экспериментально. Постоянную времени можно определить расчетным путем или путем выбора приведенных в справочных таблицах значений (как правило, принимаются средние значения).
СПИСОК ЛИТЕРАТУРЫ
1. Болотин М.М., Новиков В.Е. Системы автоматизации производства и ремонта вагонов. Учебник для вузов ж.-д.. трансп. 2-е изд., перераб. и доп..-М..:Маршрут. 2004.-310 с
2. Болотин М.М., Осиновский Л.Л. Автоматизация производственных процессов при изготовлении и ремонте вагонов. Учебник для вузов. М.:Транспорт, 1989.
3. Выжигин АЮ. Гибкие автоматизированные системы: учеб. пособие. М.: Машиностроение, 2009. 288 с.; ил.
4. Гибкоеавт оматическое производство. Под ред. С.А.Майорова. Л.:Машиностроение, 1991.
5. Дудкин Е.П., Попов А.П. Основы теории АСУ. Учебное пособие.-С-Пб:ПГУПС, 1998.
6. Cоколов М.М., Морчиладзе И.Г., Третьяков А.В.Инфраструктура вагоноремонтных предприятий: Учебное пособие. – М.: ИБС-Холдинг, 2010. – 416 c.
7. Шишмарев В.Ю. Автоматизация производственных процессов в машиностроении: учебник для студ. высш. учеб. заведений / В.Ю.Шишмарев. – М.: Издательский центр “ Академия”, 2007. – 308 с.
8. Цыган Б.Г., Цыган А.Б. Вагоностроительные конструкции {изготовление, модернизация, ремонт}: монография.- Кременчуг.: Издательство “Кременчуг”, 2005. – 751 c.

